昨年開催された小学生ロボコン2023全国大会。ここでは「サンプルリターン」~はるかかなたの生まれ故郷へ~というテーマで、研究用サンプル(色ごとに高さの異なる紙コップ)や、対戦相手がプログラムした小惑星のサンプル(金色の紙コップ)を2分間で持ち帰り、さらに小上がりの段差ゾーンにサンプルを置くと高得点が得られるという競技が行われました。この記事では大会で指定されているロボット工作キット「kurikit」(
https://kurikit.ux-xu.com/robot-contest/)を提供するユカイ工学の和田義久氏と同 花守拓樹氏を招き、小学生チームの奮闘ぶりを振り返りつつ、各チームの特色や戦いのポイントなどについて、初心者のみなさんも楽しめるように平易に解説していただきました!

 ユカイ工学 和田義久氏(以下、敬称略)
ユカイ工学 和田義久氏(以下、敬称略)
 ユカイ工学 花守拓樹氏(以下、敬称略)
ユカイ工学 花守拓樹氏(以下、敬称略)
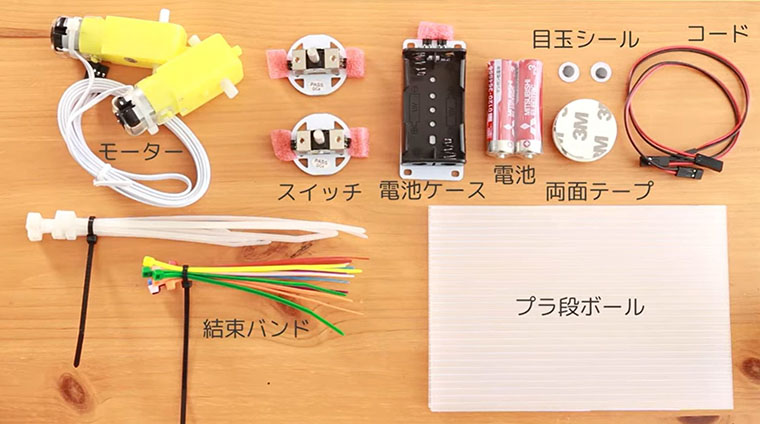
和田:私たちユカイ工学は、小学生ロボコンが立ち上がるときから技術支援という形でイベントのお手伝いをさせて頂いております。そのなかで小学生がロボットを簡単に作り始められるように、「ユカイな生きものロボットキット」(
https://youtu.be/qGzb-St5WS8)という工作キットを開発してきました。現在の大会でも指定教材になっていますが、それらに結束バンドで廃材など身近な材料を組み合わせることで、ユニークな動きの個性的なロボットを創造できるようになります。本シリーズは大好評で、おかげ様で累計1万台を突破しました。

花守:このキットを利用して、私はいろいろなワークショップで講師を担当してきました。みなさんが作ってくれた成果物が全員まったく異なるものになることが、「ユカイな生き物シリーズ」の大きな特長になっています。他の市販キットのように完成形がないので、自分たちで創意工夫することで、多彩なロボットを製作できる点がウリです。工作以外にも小学生が気軽にプログラミングに挑戦してもらえるように、ソフトウェアと連動してロボットを無線で動かせる拡張用の「ココロキット」(
https://youtu.be/Q5BNGEuh5Lw)なども発売しています。さらに簡単にロボットを作れるように、ダイヤブロックを利用した「動くブロック」(
https://youtu.be/ATBzOhsquI0)も開発しました。
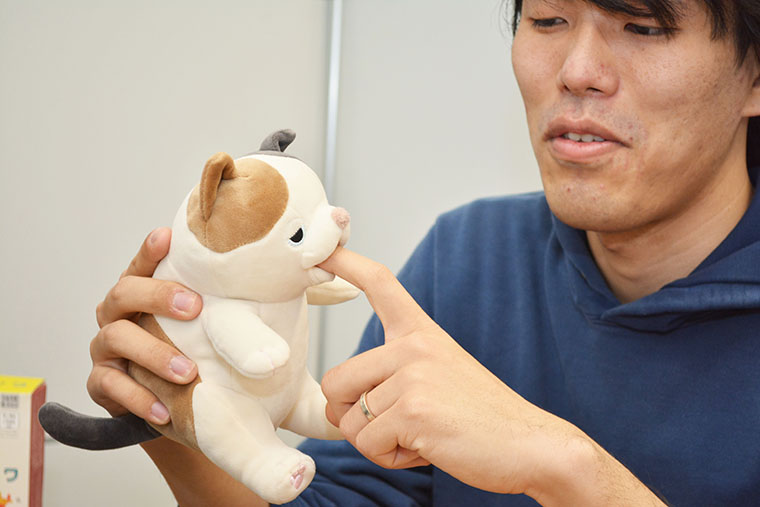
花守:それから小学生ロボコンとは直接関係はないのですが、ユカイ工学ではその名の通りユカイなロボットも発売しています。その代表例が「甘噛みハムハム」です。これは子育ての思い出から生まれた、新しい癒やしを提供するユニークなロボットです。赤ちゃんや幼いペットの短い期間にしか体験できない幸せなしぐさの甘噛みを再現しました。「心地がいいけれど、止めさせないといけない」という魅惑の甘噛みをいつでも味わうことができます。

 和田
和田:さて、ここから本大会について解説します。試合はチームメンバーがひとり1台ずつ自作のロボットを持ち寄って参戦するかたちになります。第1ラウンドと第2ラウンドの2回で競技を行い、得点の高かった上位2チームが決勝に進みます。
【第1ラウンド】
■第1試合 先攻:たい焼きチーム
メンバー:ぐんま大会代表 黛 優輝くん/全国共通オンライン予選会 選抜 金 悠馬くん/埼玉大学大会2023代表 酒井かのんさん
 花守
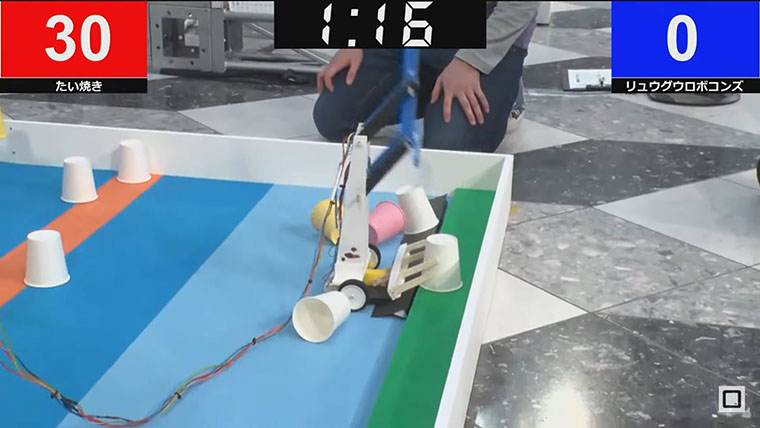
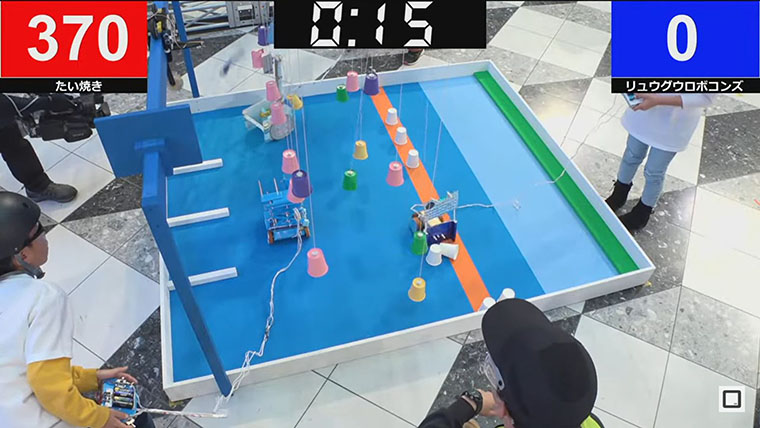
花守:まず第1ラウンドの第1試合のたい焼きチームからご紹介しましょう。各メンバーが上手に役割を分担しながらサンプルを持ち帰っていますね。金君のロボットは4筒の飛び道具(
https://youtu.be/l2mbabZfnv0?t=3869)があり、コップを狙い打ちできます(
https://youtu.be/l2mbabZfnv0?t=4008)。最も高いコップは1mの位置に吊るされているので、何か弾のようなモノを飛ばして落とす必要があるのです。
 最も高いコップは1mの位置に吊るされているので、何か弾のようなモノを飛ばして落とす必要があります。
和田
最も高いコップは1mの位置に吊るされているので、何か弾のようなモノを飛ばして落とす必要があります。
和田:黛くんのロボットはリンクで展開して50cmぐらいのコップを取れます(
https://youtu.be/l2mbabZfnv0?t=3872)。またショベルがあり、下に落ちた紙コップを拾って、高得点の段差ゾーンに載せられます(
https://youtu.be/l2mbabZfnv0?t=4039)。
 ロボットのショベルで下に落ちた紙コップを拾って、高得点の段差ゾーンに載せることができる。
ロボットのショベルで下に落ちた紙コップを拾って、高得点の段差ゾーンに載せることができる。
 ロボット内部に紙コップを溜められるようになっている。
花守
ロボット内部に紙コップを溜められるようになっている。
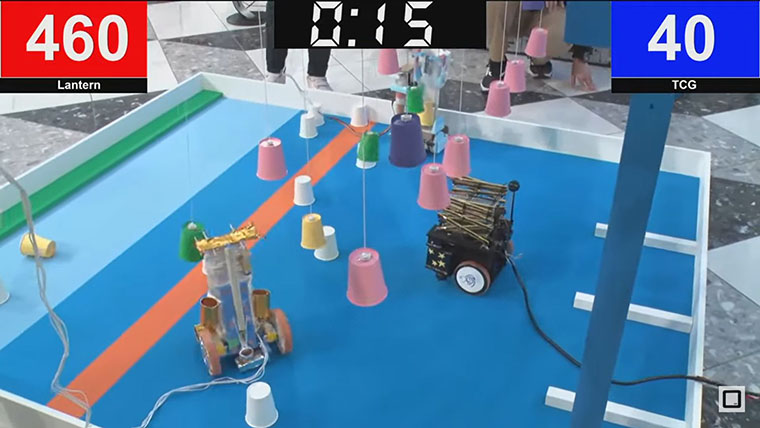
花守:小学生ロボコンでは市販部品を使えず、紙、ダンボール、プラスチックなどで工作することが基本です。モータも4つまでしか使えないので、実は棒を上下させるような機構をつくるだけでも難しいのです。全国大会レベルのロボットは、機構をしっかり作りこんでおり、そのぶん工作も凄く大変です。それから相手チームは、フィールドの一番奥で動く小惑星をプログラミングし、その金色のコップを取らせないように邪魔することができます(
https://youtu.be/l2mbabZfnv0?t=4033)。小惑星には横と下を見るセンサーが付いています。
 相手チームによってプログラミングされた、フィールドの一番奥で動く小惑星のロボット。ぶら下がっている金色のコップを取らせないように動く。
相手チームによってプログラミングされた、フィールドの一番奥で動く小惑星のロボット。ぶら下がっている金色のコップを取らせないように動く。
■第1試合 後攻:リュウグウロボコンズ
メンバー:全国共通オンライン予選会 選抜 山本桜太くん/全国共通リアル予選会 金子史哉くん/ステモンコップ代表 山尾結花さん
 花守
花守:このチームも役割分担が上手くできていました。山本くんと金子くんがコップを取る役割で、山尾さんが落としたコップを格納して戻す役割です。山本くんのロボットはパンタグラフを伸ばして、2つのツノでコップを挟んで落とすしくみですね(
https://youtu.be/l2mbabZfnv0?t=4492)。
 パンタグラフを伸ばして、2つのツノでコップを挟んで落とすしくみのロボット(写真右)
花守
パンタグラフを伸ばして、2つのツノでコップを挟んで落とすしくみのロボット(写真右)
花守:また、たい焼きチームのように弾を発射してコップを落とす機能もありました(
https://youtu.be/l2mbabZfnv0?t=4468)。この弾は飛んだときにチューリップのように開いてコップの命中率を高くする工夫もされていたようですが、ここでは機能しなかったようです。
 弾を発射してコップを落とす機能。弾には飛んだときにチューリップのように開いてコップの命中率を高くする工夫もされていた。
弾を発射してコップを落とす機能。弾には飛んだときにチューリップのように開いてコップの命中率を高くする工夫もされていた。
和田:金子くんのロボットはタイヤが大きいのが特長です。また、回転運動を直線運動に変換するギア(ラック&ピニオンと呼ばれる)を使って、棒が上下に動くようにしています(
https://youtu.be/l2mbabZfnv0?t=4480)。これをつくるのも段ボールの内側にある段々をはがしてギアとしているのが素晴らしいアイデアです。あと棒の先端にあるカギ爪が動いてコップを振り落とすしくみですが、オンオフのスイッチだけで微細な操作をするので相当な練習をしたと思います。
 タイヤが大きく、回転運動を直線運動に変換するギア(ラック&ピニオンと呼ばれる)を使って、棒が上下に動く金子くんのロボット。
タイヤが大きく、回転運動を直線運動に変換するギア(ラック&ピニオンと呼ばれる)を使って、棒が上下に動く金子くんのロボット。
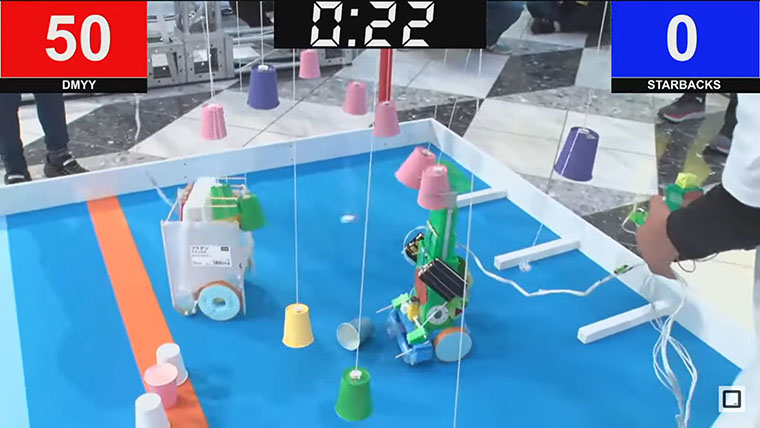
花守:山尾さんのロボットはブルドーザーのようになっており、落ちたコップを集めることに専念していました。2つのモータを使ってシンプルにすることで故障を少なくしています。ロボットがいくらコップを落としたとしても、最後にスタートゾーンに戻さないと得点にならないので、ある意味では「守り神」のような非常に重要な役割を果たしていましたね(
https://youtu.be/l2mbabZfnv0?t=4556)。
 ブルドーザーのようになっており、落ちたコップを集めることに専念する山尾さんのロボット。2つのモータを使ってシンプルにすることで故障を少なくしている。
ブルドーザーのようになっており、落ちたコップを集めることに専念する山尾さんのロボット。2つのモータを使ってシンプルにすることで故障を少なくしている。
メンバー:全国共通オンライン予選会 選抜 金子雅春くん/富士見市大会代表 立久井 陽愛さん/全国共通オンライン予選会 選抜 田中 翔くん
 花守
花守:金子くんのロボットは、2段ハシゴが同時に展開するしくみで、70㎝まで伸びてカッコいいですね。ヒモを引っ張ってハシゴをスライドさせているようです。2段目のハシゴは、全国大会に向けて、あとから追加したものなので努力のたまものですね(
https://youtu.be/l2mbabZfnv0?t=4938)。さらにハシゴだけでなく、グリップも付けてコップをはさめる点も良いですね(
https://youtu.be/l2mbabZfnv0?t=4951)。
 2段ハシゴが同時に展開するしくみで、70㎝まで伸びる 金子くんのロボット。ヒモを引っ張ってハシゴをスライドさせているようだ。
和田
2段ハシゴが同時に展開するしくみで、70㎝まで伸びる 金子くんのロボット。ヒモを引っ張ってハシゴをスライドさせているようだ。
和田:立久井さんのロボットは、熊手のようなアームを伸ばしてコップを落としていましたが、それ以外にも発射機構が付いて、高いコップを落とせるようになっていました(
https://youtu.be/l2mbabZfnv0?t=4943)。ゴムの力をためて一気に飛ばすので、速い筒が飛んで目で追い切れなかったです。見どころは、ロボットを操作するコントローラも自作している点。身近な材料のアルミホイールと棒でオンオフのスイッチから作っています。
 熊手のようなアームを伸ばしてコップを落とすことができ、高いコップは発射機構で落とせるようになっている 立久井さんのロボット(写真左)
花守
熊手のようなアームを伸ばしてコップを落とすことができ、高いコップは発射機構で落とせるようになっている 立久井さんのロボット(写真左)
花守:田中くんのロボットは、探査機のハヤブサを細かいところまで模しています。省スペースの中に盛りだくさんの機能を詰め込んで、宇宙からサンプルを持ち帰れるように、ロボット内に紙コップを重ねて回収できる工夫を凝らしていました。しかも立久井さんと同様に発射機能も付いていました(
https://youtu.be/l2mbabZfnv0?t=4991)。大変作り込まれたロボットで、個人の「ロボット大賞」を取りました。
 探査機のハヤブサを細かいところまで模している 田中くんのロボット(写真左)
和田
探査機のハヤブサを細かいところまで模している 田中くんのロボット(写真左)
和田:後半に金子くんのロボットが小惑星のコップ取りに挑戦してくれたのも見どころになりましたね(
https://youtu.be/l2mbabZfnv0?t=5010)。相手のTCGチームは、小惑星の超音波センサーによって下にいるロボットを検知し、相手がいたら逃げるところまで考えてプログラムを実装していたので、とても良いバトルになっていました。本心としては、こういったプログラミングまでやってもらえると嬉しいと思いました。
■第2試合:後攻 TCG(Team Challenge Galaxy)
メンバー:ぬまず大会代表 津田樹希くん/全国共通オンライン予選会 選抜 浦野翔太くん/全国共通オンライン予選会 選抜 田中更紗さん
 TCG独自のフォーメーション。狭いフィールドの中で選手同士のコードが絡まらないよう工夫。
花守
TCG独自のフォーメーション。狭いフィールドの中で選手同士のコードが絡まらないよう工夫。
花守:TCGが他チームと異なる点は、スタート時のフォーメーションです。前に2人、後ろに1人という立ち位置になっていました。コントローラとロボットが有線でつながれているので、狭いフィールドの中で選手同士のコードが絡まらないように、こういう立ち位置にしたのだと思います。 それから、すべてのロボットが発射機構を持っていて、コップを落とせるようになっていた点もこのチームの特長でしたね。
 パンタグラフで上に展開し、黒い弾が上に向かって飛び出す仕掛けになっている津田くんのロボット(写真右)
花守
パンタグラフで上に展開し、黒い弾が上に向かって飛び出す仕掛けになっている津田くんのロボット(写真右)
花守:一方、浦野くんのロボットはタイヤが大きくて、動きが速くなっています。タイヤの周りにもゴムを巻き付けて滑らないようにしていました。展開機構はベルトか、あるいはヒモを使って巻き取って上げて、コップを上手く取っていましたね(
https://youtu.be/l2mbabZfnv0?t=5529)。
 タイヤが大きいため動きが速く、タイヤの周りにもゴムを巻き付けて滑らないようにしていた浦野くんのロボット(写真手前)
和田
タイヤが大きいため動きが速く、タイヤの周りにもゴムを巻き付けて滑らないようにしていた浦野くんのロボット(写真手前)
和田:田中さんのロボットは上下機構に前出のラック&ピニオンを採用していました(
https://youtu.be/l2mbabZfnv0?t=5510)、回転ギアを直動のギザギザ棒に当て、回転運動を直線運動に変換しています。発泡スチロールですべてのギアを手で切っているのは、神業のような手練で本当に感心してしまいました。でも、こういう苦労をみるほどに、気持ち的には市販の機械部品を使わせてあげたくなってしまいますね。
 上下機構にラック&ピニオンを採用していた 田中さんのロボット(写真左上)
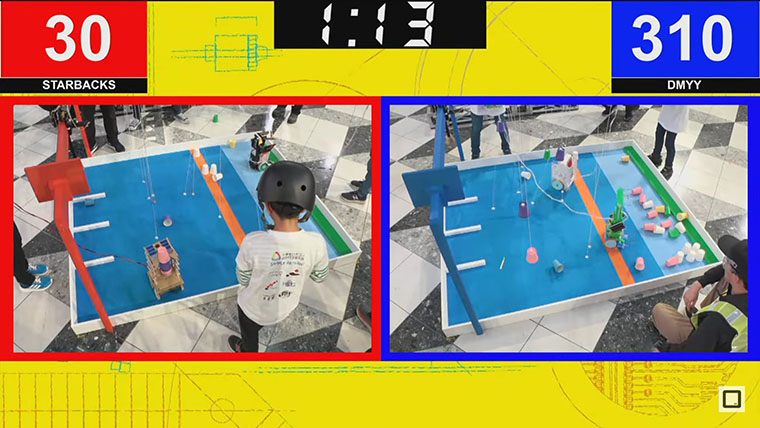
■第3試合:先攻 DMYY
上下機構にラック&ピニオンを採用していた 田中さんのロボット(写真左上)
■第3試合:先攻 DMYY
メンバー:全国共通オンライン予選会 選抜 炭山悠真くん/みんなで!!ロボットコンテスト!!第2回アドバンス杯代表 玉置大悟くん(病欠)/全国共通リアル予選会 選抜 脇田悠生くん
 花守
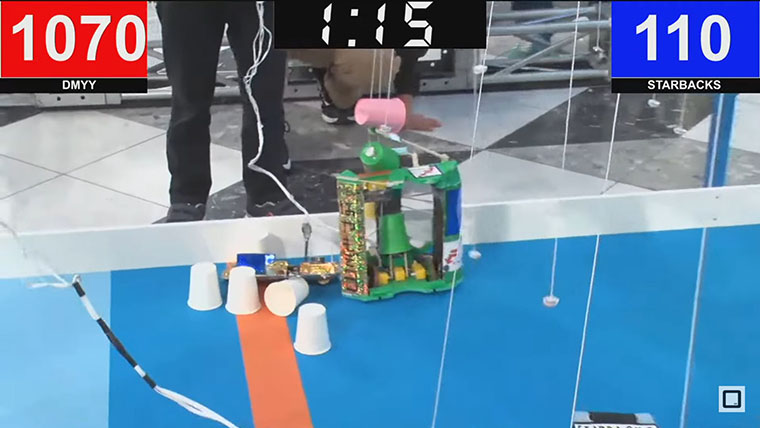
花守:このチームは、残念ながら玉置くんが病欠になってしまったので、残りの2人で戦っていました。脇田くんのロボットは斜めから発射できる機構があり、スタート直後にスナイパーのような正確さでコップを打ち落としました(
https://youtu.be/l2mbabZfnv0?t=5938)。またコップが2つ同時にハマるように設計され、同時に取れたことも素晴らしいと思いました(
https://youtu.be/l2mbabZfnv0?t=5952)。あとから上下機構の部分を一段ぶん追加している点も努力が現れています。
 斜めから発射できる機構があり、スタート直後にスナイパーのような正確さでコップを打ち落とした脇田くんのロボット(写真右)
斜めから発射できる機構があり、スタート直後にスナイパーのような正確さでコップを打ち落とした脇田くんのロボット(写真右)
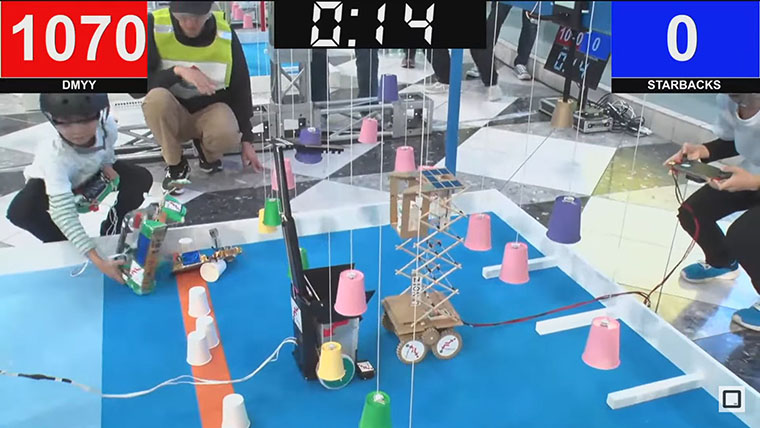
和田:脇田くんのロボットはハイレンジのコップを狙っていました。一方で炭山君はミドルレンジを狙っていました。上下展開は長方形の箱を引き延ばす形なので剛性が高く、強く安定した作りになっていました。また炭山くんは脇田くんが落としたコップを黙々と回収しており、二人の役割分担が上手くできていました(
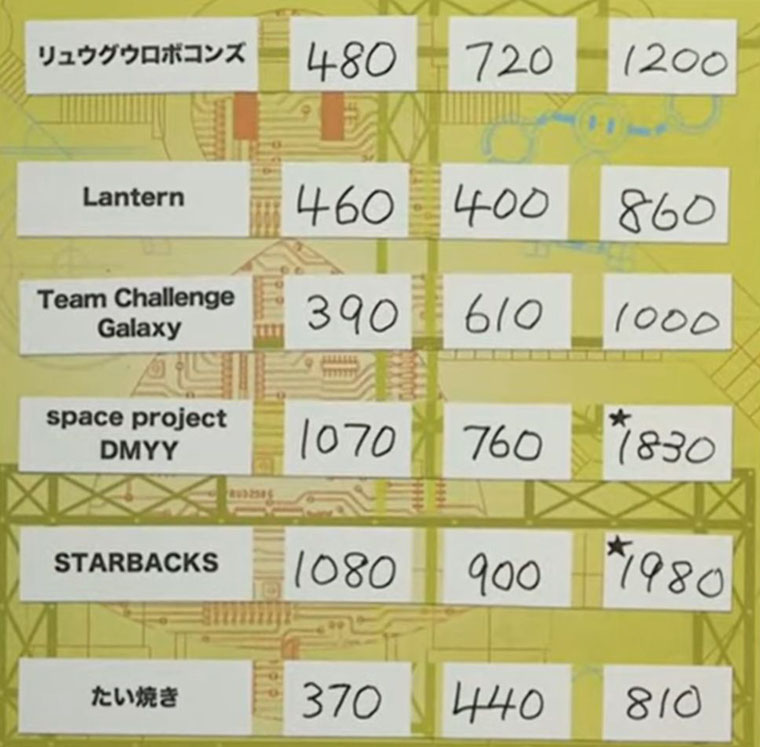
https://youtu.be/l2mbabZfnv0?t=6007)。炭山君のロボットはコップを落とさずにロボット内に取り込める機構がポイントになりました。二人で協力して紙コップを金色以外すべて取り、1070点を取ったのは素晴らしかったですね。
 コップを落とさずにロボット内に取り込める機構がポイントの 炭山君のロボット(写真左)
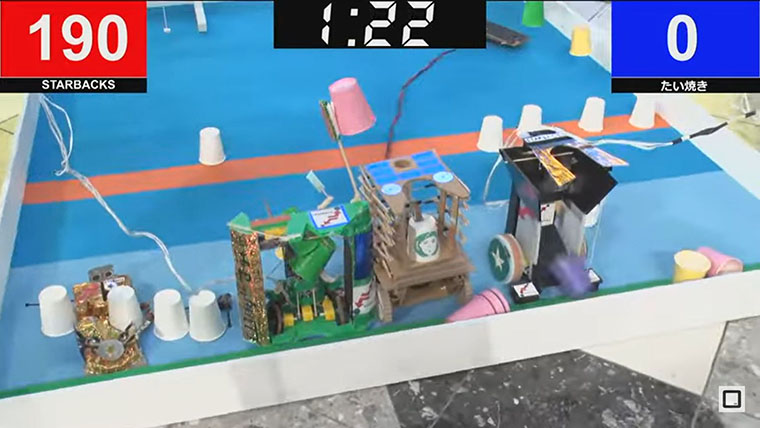
■第3試合:後攻 STARBACKS
コップを落とさずにロボット内に取り込める機構がポイントの 炭山君のロボット(写真左)
■第3試合:後攻 STARBACKS
メンバー:長野予選会代表 古田渉留くん/全国共通オンライン予選会 選抜 森川秦輝くん/全国共通オンライン予選会 選抜 佐藤志遠くん
 和田
和田:ロボットは3台とも個性的でした。まずスタート直後に素早く上にアームを展開したのは古田君のロボットで、アームが2段に上に伸びて手前の70㎝のコップを取っていきました(
https://youtu.be/l2mbabZfnv0?t=6482)。全国大会のみなさんは普通にやっていますが、実はロボットの高さよりも2倍以上高い展開機構を作るのは大変なことなのです。コップを落としてロボット内部に取り込めるようにしている点もグッドでした。
 2段に伸びるアームを素早く上に展開し、手前の70㎝のコップを取った 古田君のロボット(中央左)
花守
2段に伸びるアームを素早く上に展開し、手前の70㎝のコップを取った 古田君のロボット(中央左)
花守:森川くんのロボットは、クルマのワイパーのようなものが付いており、繰り返しの動きでワイパーの先端にある粘着テープで紙コップを「ペシペシ」と叩いて張り付けるしくみです。それから火星探査機の「キュリオシティ」を模した子機ロボットも出てきて、これを使って下に落ちたコップを引きずって回収していくアイデアも良かったですね(
https://youtu.be/l2mbabZfnv0?t=6536)
 クルマのワイパーのようなものが付いている 森川くんのロボット
花守
クルマのワイパーのようなものが付いている 森川くんのロボット
花守:佐藤くんのロボットは、割り箸のパンタグラフが丈夫で、ゆっくりと力強く動かしていました。パンタグラフが伸びるとゴムも引っ張られ、最高到達点で弾が発射されてコップを打ち落とす点も面白かったです(
https://youtu.be/l2mbabZfnv0?t=6486)。コップを取るときは、そのフチをひっかけて、パンタグラフを下げて落としていました。
 割り箸のパンタグラフが丈夫で、ゆっくりと力強く動かすことができる 佐藤くんのロボット(写真右)
和田
割り箸のパンタグラフが丈夫で、ゆっくりと力強く動かすことができる 佐藤くんのロボット(写真右)
和田:このチームも先攻のDMYYと同様に、とにかく結束が強かったですね。メンバーの役割分担も良く、あっという間にコップを取ってしまいました。得点もDMYYより10点差をつけ、これまでの最高の1080点を取って、会場を驚かせました。得点可能な最高点は1250点なので、両チームとも素晴らしい結果になりましたね。
【第2ラウンド】
 ■第1試合:先攻 リュウグウロコンズ
■第1試合:先攻 リュウグウロコンズ
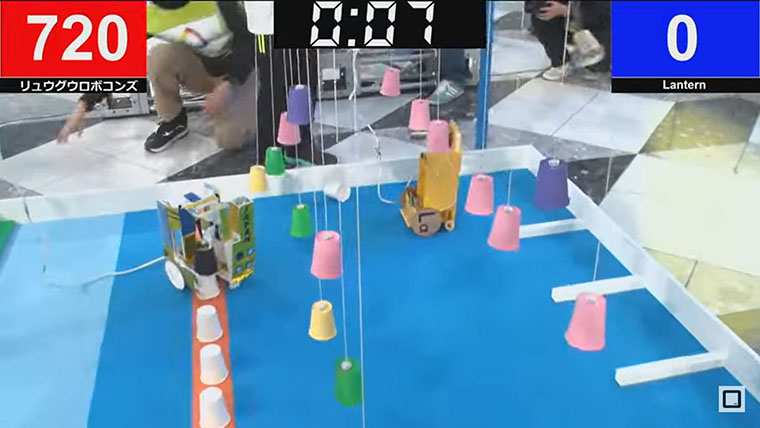
花守:さて二試合目です。リュウグウロコンズは一試合と同様に、各メンバーが自分がやるべき仕事をきっちりこなしていました。みなさん自分が取ったコップを、いったん早めに戻しにいくという冷静な判断をしていました。この試合では金子くんのロボットがコップを落としている様子がよく見られました。アームを回転させながら、はたくようにコップを下に上手く落としています(
https://youtu.be/l2mbabZfnv0?t=7536)。
 和田
和田:山本くんのパンタグラフのロボットも大活躍していましたね。ただパンタグラフが展開し車高が高くなった状態で動くことの難しさも理解できました。山尾さんは黙々と下に落ちたコップを運んでいて、これも良いポイントにつながりました。
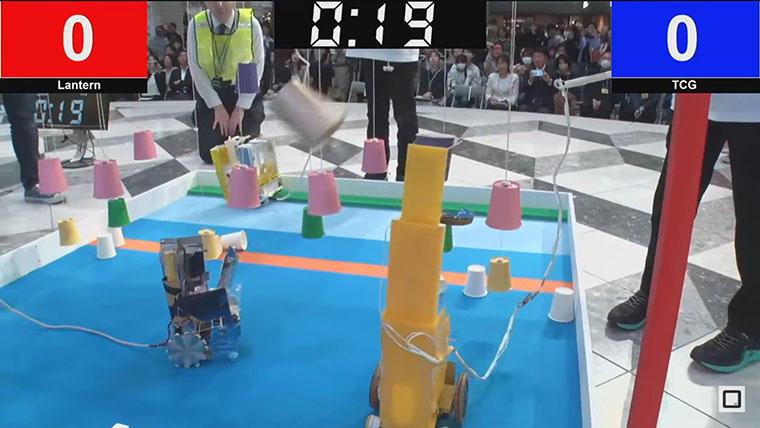
■第1試合:後攻 Lantern
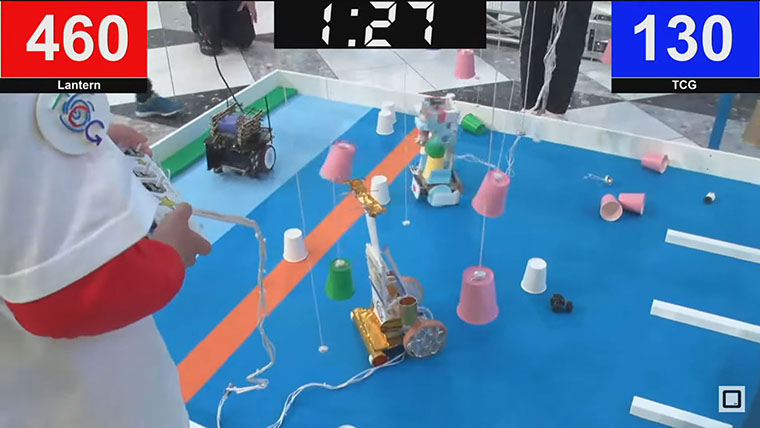
花守:この試合ではLanternの田中くんの紙コップ回収機構が良く見えました。黒いコップで目的のコップを重ねて取るしくみです(
https://youtu.be/l2mbabZfnv0?t=7941)。
 和田
和田:フィールドが狭いため、どうしても試合途中にロボット同士が密集してしまい、どのように動いて良いのかお互いにわからなくなるシーンもありました。コントローラのケーブルの長さに制限があるため(2m)余計に難しかったと思います。それぞれのロボットがコップに向けて発射して良い動きをしていましたが、やはり3人でこの数のコップを捌いていくことの難しさを感じる試合でもありました(
https://youtu.be/l2mbabZfnv0?t=7999)。それから田中くんがインパクター(弾)を発射してコップに上手く当てられたのですが、コップの磁石が強かったのか、撃ち落とせなかったことが惜しかったですね(
https://youtu.be/l2mbabZfnv0?t=8009)。
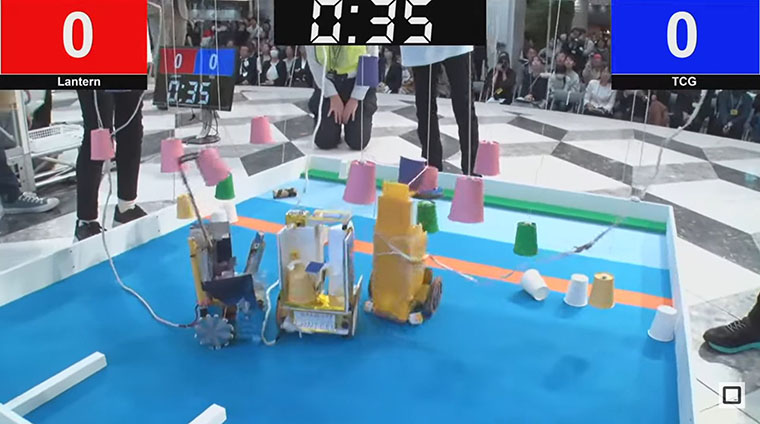
■第2試合:先攻 TCG
花守:第二試合の見どころは、まず序盤で津田くんのロボットが弾を発射してコップを落としたシーンです。コップには命中しませんでしたが、ラッキーなことに下に落ちてきた弾がコップに当たって上手い具合に落とせましたね(
https://youtu.be/l2mbabZfnv0?t=8384)。
和田:それから津田くんは、後半戦で小惑星の自動ロボット(金色のコップ)のコップ取りにチャレンジしてくれました。ロボットの向きを変えれば、あと一歩で取れそうなところでした。ただ、このとき自動ロボットを担当していた対戦相手のDMYYもプログラミングが良くできていました。小惑星を無闇に動かすと、その勢いで金のコップが落ちてしまう可能性があります。そこでセンサーを利用して、小惑星の下にロボットがいないときは動かさず、ロボットが近くに来たときだけ小惑星を逃がしてコップを取らせないアルゴリズムにしていました(
https://youtu.be/l2mbabZfnv0?t=8451)。
 花守
花守:最終的に自動ロボットのコップを取れませんでしたが、この攻防は見ていて私自身もすごく興奮しましたね。相手のDMYYのプログラミングは、必要なとき以外は小惑星を動かさないという「静」のプログラミングでした。これを見ることができた点も大きなポイントになりましたよ。
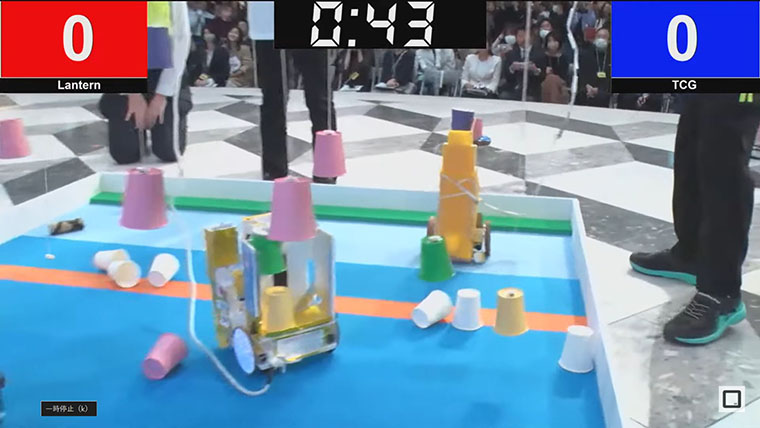
■第2試合:後攻 DMYY
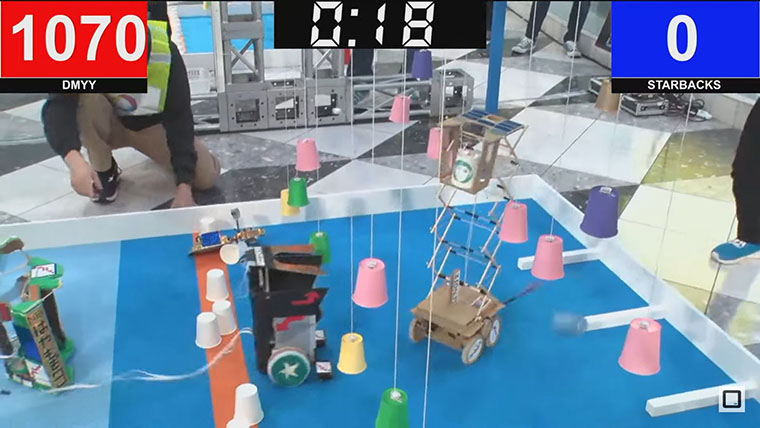
花守:第2試合目後攻のDMYYの見どころは、やはり炭山くんのロボットの隠し技が炸裂したところです(
https://youtu.be/l2mbabZfnv0?t=8916)。一試合目では出さなかった機能ですが、下から打ち上げ花火のように弾を発射する機構が付いており、後半でコップを打ち落とすことに見事に成功していました。それからロボット内部に複数のコップを取り込んで効率良く運べていたことも得点源になっていましたね。
 和田
和田:脇田くんのロボットがすべての弾を発射したあとに、フォローする形で炭山くんのロボットが弾を発射するという作戦も上手く連携が取れていて良かったですね。
花守:あと気づいた点は、DMYYは一試合目ではコップを全部取れていたのですが、二試合目では一部のコップの取り残しがあったことです。これはたぶん脇田くんのロボットが一度リトライになったからかもしれません。いずれにしても1回のリトライの影響だけでも試合結果に影響がでることがわかった試合でした。
■3試合:先攻 STARBACKS
和田:STARBACKSは三者三様のロボットがきっちり役割を果たしていました。ここでの見どころは森川くんのロボット。序盤で火星探査機を模したロボットから子機が出てきます(
https://youtu.be/l2mbabZfnv0?t=9258)。コップの回収機構も「鳥もち」のごとくワイパーの先でペタっと貼り付けたり、ほかの部分でもいろいろな取り方ができるように工夫したりしています。見た目は地味な印象ですが、実は何気に多くのコップを取ってきて素晴らしかったです。たくさん練習をして大会に臨んだのでしょう。
 花守
花守:このチームのロボットは、コップを落とすだけでなく、ちゃんと回収できる機能を3台とも備えていた点も偉かったですね。古田くんは最後の最後で3つもコップを持ち帰ってきて大健闘しました(
https://youtu.be/l2mbabZfnv0?t=9359)。
 ■第3試合:後攻 たい焼き
■第3試合:後攻 たい焼き
花守:この試合では、金くんが「小惑星のコップ取りにチャレンジする」と宣言して始まりました。彼は最後まで諦めずにコップを狙ってくれました(
https://youtu.be/l2mbabZfnv0?t=9792)。この小惑星の自動ロボットを苦労して作った我々としてはとても嬉しかったですね。
 和田
和田:金くんのチャレンジの一方で、黛くんと酒井さんがコップを取って戻すという地道な作業を後方で繰り返し、金君の果敢なチャレンジを陰ながら支えており、良いチーム編成だったと思います(
https://youtu.be/l2mbabZfnv0?t=9757)。酒井さんのロボットは内部にたくさんのコップをためていました。
■決勝戦(同時対戦)STARBACKS vs DMYY
 和田
和田:決勝戦は本当に大激戦になり、最後まで手に汗握る試合になりました! 両チームとも小惑星の金色コップ以外、すべてのコップを持ち帰ってきました。最後はどれだけ高得点(加点)ゾーンに載せられたかということが勝負の分れ目になりましたね。見ている我々もハラハラドキドキの戦いでした。
花守:本当にそうですね。両チームの戦い方を比べてみると、STARBACKSがロボットの内部でコップを回収して帰還するのに対して、DMYYのほうは先にコップを落としてから、それを集めて帰還するという方法で、両チームの攻略方法の違いを比較できて面白かったですね。
 和田
和田:最終的にSTARBACKSが1080点、DMYYが1030点となりました。50点の僅差でSTARBACKSが優勝しましたが、2名のDMYYがここまで大善戦したのも素晴らしかったですね!

小学生ロボコンは、高専ロボコンと異なり、ほとんどのロボットの部品をいちから手作りするため、逆に幅広い発想が活かされる機会も多くあります。たとえば段ボールの裏側の溝をギアの歯にしたり、発泡スチロールで歯をいちから工作したり、工作自体も大変なのですが、そういった楽しさも含めての小学生ロボコンなのかもしれません。
こういったイベントに子供たちが参加することで、未来の「ロボコニスト」や科学者の卵が生まれることに期待したいと思います。また子供たちを温かく見守ってくださったメンターや運営関係者、そして親御様にも敬意を表したいと思います。素晴らしい大会をありがとうございました!
井上猛雄
産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、株式会社アスキー入社。「週刊アスキー」副編集長などを経て、2002年にフリーランスライターとして独立。おもにエンタープライズIT、ネットワーク、セキュリティ、ロボティクス、組込み分野などを中心に、Webや雑誌で記事を執筆。主な著書は、「災害とロボット」(オーム社)、「キカイはどこまで人の代わりができるか?」(SBクリエイティブ)など。











 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips 知識・Tips
知識・Tips