ものづくりLoversのためのメディア
【ロボコンOBによる、初心者向けみどころ解説】高専ロボコン2023全国大会編



【1回戦】第1試合 鶴岡高専 vs 高知高専

第2試合 徳山高専 vs 福島高専
第3試合 長野高専 vs 香川高専(詫間)
第4試合 熊本高専(八代)vs 苫小牧高専


第5試合 大阪公大高専vs 東京高専

第6試合 旭川高専 vs 佐世保高専


第7試合 鈴鹿高専 vs 北九州高専

第8試合 富山高専(本郷) vs 近大高専
第9試合 長岡高専 vs 仙台高専(広瀬)


第10試合 小山高専 vs 鳥羽商船高専

花守:それからロープのすり抜け方も、前方の口を開けるという細かい演出があって可愛いかったですね。おなかの中に上下の機体を支える機構が3ヵ所あり、そこを順次開放しながらロープを通していました。前面から見ると、タイヤが絶妙な感じで斜めに設置され、ロープの傾きに合わせていることがわかりました。タイヤ径をできるだけ大きくするための工夫だと思います。そうすることで一回転あたりの進行速度も上がりますから。

花守:ろーりんぐあたっくは面白い機構でしたが、旋回に時間がかかりすぎた点が弱点でした。あと少し早くスタート地点に戻れば高得点をゲットできたはずですが、いかに一周目に速く回るかによって、採るべき戦略が変わってくる点も見どころになっていました。
第11試合 阿南高専 vs 沖縄高専
和田:沖縄の「獅子舞プロジェクト」は、もぎもぎフルーツの言葉どおりに、獅子舞が口をパクリと開けてフルーツを飲み込むというダイナミックな動きが印象的でした(https://youtu.be/dDdRVrF7438?t=9856)。本大会では獅子舞の首の自由度をひとつ加えてコミカルな動きになっているのも面白かったですね。
花守:そうですね。ロボットがキャラクターとして完成しているという点でいうと沖縄が一番良かったかもしれません。フルーツを採るという行為を目的にするなら、本来は必要ない機能なのですが、わざわざ演出のための機能を満載していました。ロープのすり抜けも獅子舞の脚上げと連動しながら動かしている点も大好きなポイントでしたね(https://youtu.be/dDdRVrF7438?t=9896)。
第12試合 広島商船高専 vs 産技高専(荒川)
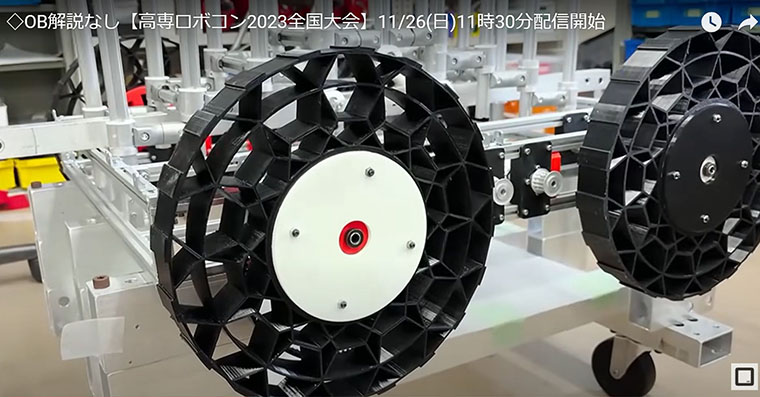
花守:この試合は、両者とも重心が高い機体の対決で、なおかつ脚回りのメカが独創的で、他に例を見ない作りが目をひきました。まず広島商船の「風鈴崋山」は、人力車のような3輪リムレスホールを採用して高速走行し、ロープを安定して跨ぎました(https://youtu.be/dDdRVrF7438?t=10278)。今回はリムレスホイールも何チームか採用していましたが、スポークにも各チームそれぞれに拘りがあったようです。スポークが少なすぎると回転時にガタガタします。一方でスポークが多すぎると、今度はロープに引っ掛かるリスクが高くなり、段差乗り越えで引っ掛かりにくくなります。
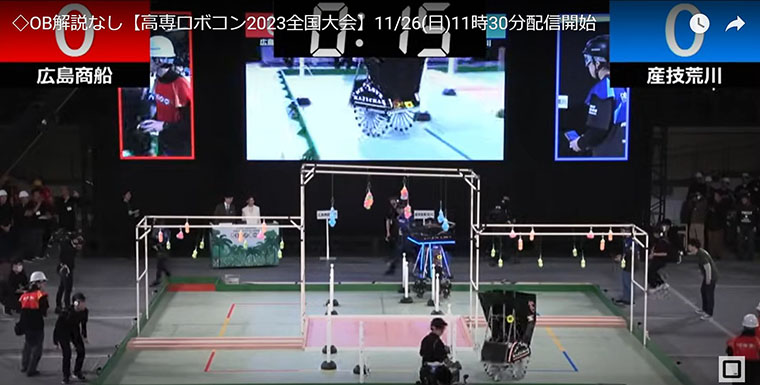
和田:そういう視点で見ると、広島商船と鳥羽商船の機体は対照的で面白かったです。広島はリムレスホイールのスポークがスカスカで、逆に鳥羽は密に詰まっている構造でした。

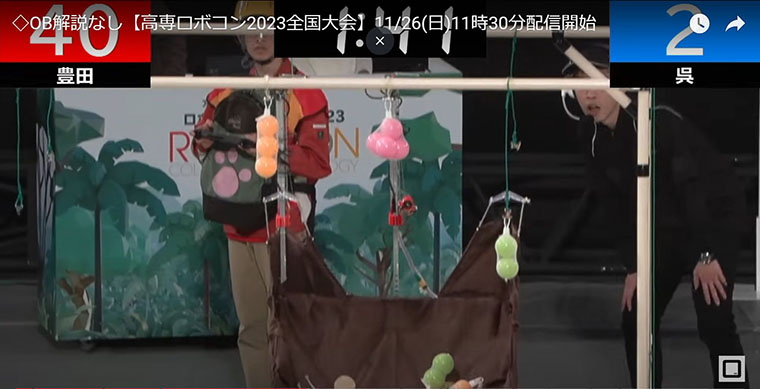
第13試合 豊田高専 vs 呉高専
花守:呉高専の「♭HARVESTER」は極薄でロープをすり抜け、かっこよくて大好きでした(https://youtu.be/dDdRVrF7438?t=10738)。肉抜きで軽量化し、F1みたいなレーサーの血と無骨な良さを感じました。サスペンションもF1の「プッシュロッドサスペンション」を使用しています。ロボットの前が上がり角材を乗り越えました(https://youtu.be/dDdRVrF7438?t=10745)。

呉は展開にパンタグラフ方式を採用し、動力源はモータと動滑車を組み合わせたウインチを採用していました。そこにおたすけアイテムを付け、フルーツを斜めから採っていました(https://youtu.be/dDdRVrF7438?t=10797)。面白いのは熊手をベルトで回していること。フルーツを掻き込んで押し込むような動きがオシャレですね。ただ残念だったのは、帰還する際にパンタグラフを縮めてフルーツのカゴを後ろに移動させるため、重心位置が後方にずれ、段差の乗り越えが難しくなってしまったこと。呉は悔しかったでしょうね。
和田:豊田のほうは外観だけ見るとファンシーな感じですが、実はハイテクが満載されていました。よく見るとおたすけアイテムに特殊なカメラが搭載されており、フルーツとの奥行の距離を認識し、カメラ映像からフルーツの位置と種類をAIで割り出していました。フルーツ画像を6万枚も学習させて検出できるようにしたそうです。豊田はこれでミカンとキウイを一気に3つ採れました(https://youtu.be/dDdRVrF7438?t=10829)。
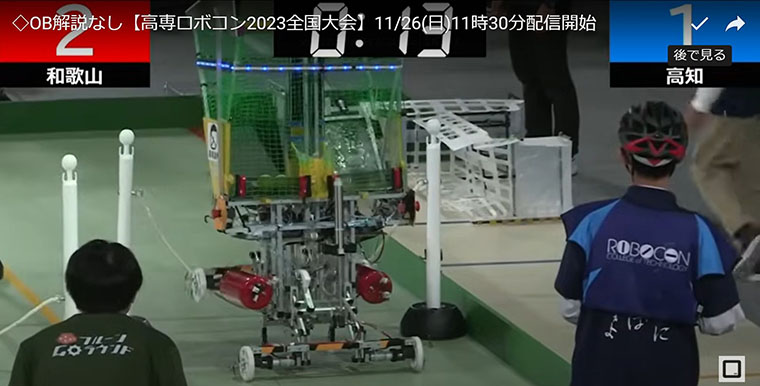
【2回戦】第1試合 和歌山高専 vs 高知高専
和田:第2回戦の第1試合は、地区大会で400点超えの高得点を獲ったシード校の和歌山高専が出場しました。ところが、ここで誰も予想しなかった大波乱が起きました。同校の「剛機果断」が敗退してしまったのです。まさに国技館には魔物がいるという感じでした。剛機果断は最初の段差超えのとき、黄色ラインを踏んでリトライになりました。これだけならリカバリーできたのですが、2回目のロープすり抜けの失敗が痛かったです(https://youtu.be/dDdRVrF7438?t=11499)。
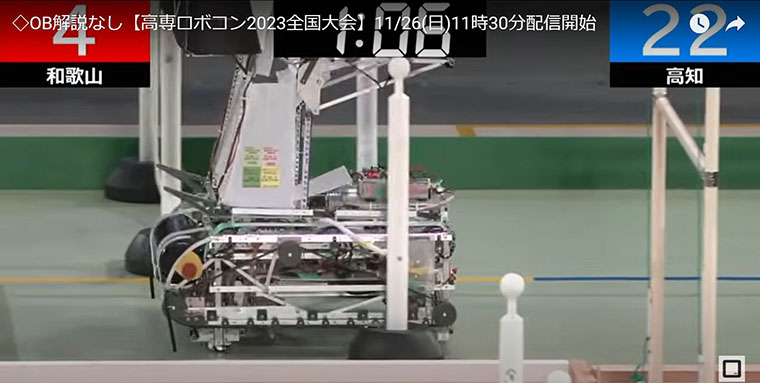
花守:和歌山のエラー原因ですが、剛機果断は上下に連結部があって、それが上手く機能しなかったようです。ロープすり抜け時に、機体の上部と下部が分離して元に合体する際に、かみ合わせができなくなったのではないかと推測されます。
花守:この試合では、香川が序盤の段差で転倒するアクシデントに見舞われました。第1試合のときに指摘させて頂きましたが、やはりエアタンクが上にあり、重心の位置が高かったことが裏目に出てしまったようです(https://youtu.be/dDdRVrF7438?t=11852)。今回のような高身長タイプの機体に起こりえるリスクでした。

和田:福島の白虎の戦略は一周目にフルーツを採らず、とにかく早く2周目のセンターゾ-ンに入って高得点を狙うというものでした。ただリトライのリスクもあるため、やはり1周目でフルーツをしっかりと採ってきた香川の戦術の勝利という感じですね。
第3試合 熊本高専(八代)vs 大阪公大高専
和田:ネタバレになってしまいますが、実質的な決勝戦1試合目ですね。基本的に大阪公大は前試合の白虎と同様にセンターゾーンに入る戦法ですが、それがピタリとはまった感じでした。

和田:対戦相手をセンターゾーンに侵入させない戦法がルール上で認められていました。ルールブックの規定をしっかりと読み、戦略を立ててシミュレーションし、実行することの大変さと重要さがみどころの一つだと思います。熊本も反対側からセンターに入るアプローチや、鴉の帰還を阻止するという手段もあったのですが、その場合でも鴉はセンターゾーンの前後から脱出できる構造なので、逃げることができてスキがなかったですね。
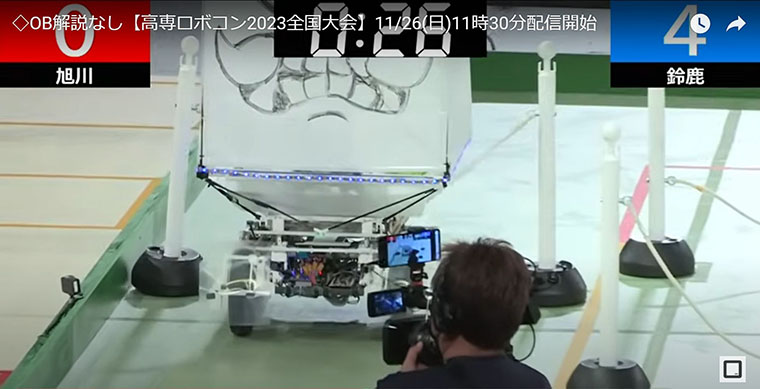
第4試合 旭川高専 vs 鈴鹿高専
花守:鈴鹿夜行は試合を通じて安定性がありましたね。ロープすり抜けの「おばけ機構」も見ていて気持ちがよかったです(https://youtu.be/dDdRVrF7438?t=12843)。鈴鹿はカーボン素材でできたプラスチックを伝統的に使うチームですが、フレームが折れたときにガーゼで巻いてギプスのようにして接着剤で固める修繕方法を採用していると聞いたことがあります。こういう方法もあるのか! と感心しました。
和田:一回戦でも少し触れましたが、フルーツの採り方もおたすけアイテムのグリップにスポンジを使って優しく把持しています。3本爪のうち2本の爪が動くようになっていて、フルーツを離したときに可能な限り同じ方向に落下させるような点も細やかな配慮になっていました。
第5試合 近大高専 vs 長岡高専
和田:とにかく自分たちが実現したいことをやるチーム同士の戦いだったので、見ていて本当に面白かったですね。実際にお互いに上手くやっていました。近大のmoggyはキリンのような長いアームでフルーツにアクセスしてモギモギして可愛かったですね。
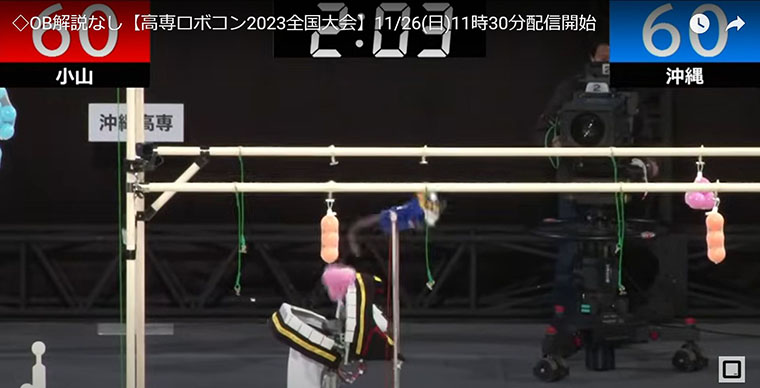
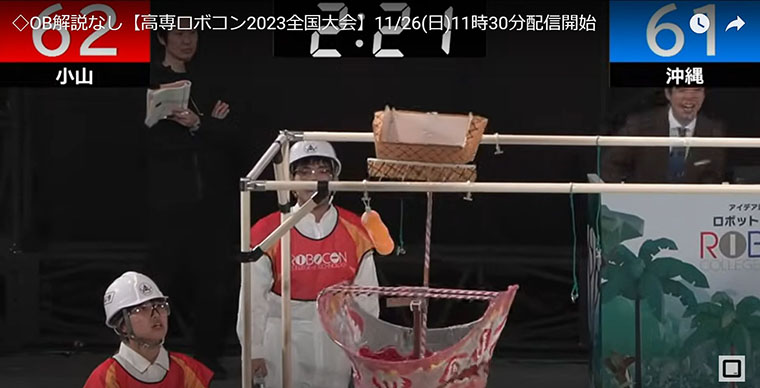
第6試合 小山高専 vs 沖縄高専
和田:第6試合も個性的なロボット同士のバトルになりました。こちらはお互いにフルーツをパクリと食べるタイプのロボットが集まりましたね。得点も僅差で高専ロボコンらしい良い試合でした。
あと小山のアイテムのほうは、お菓子のデザインが統一され、ウエハースや棒状チョコなども細かく配置されてキレイでしたね(https://youtu.be/dDdRVrF7438?t=13754)。サイズ制限で機体のお尻のイチゴが切られたというエピソードもありました。
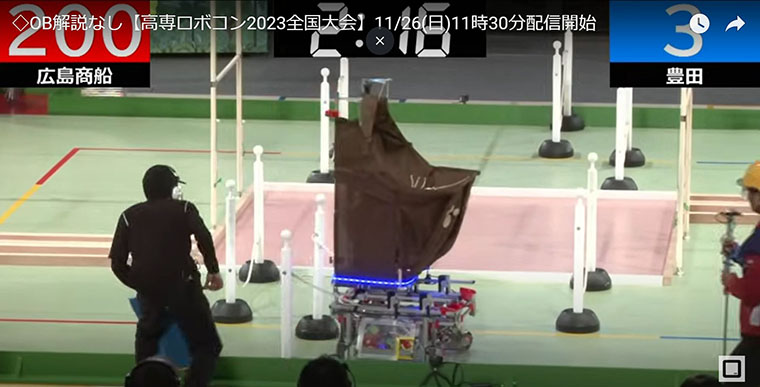
第7試合 広島商船高専 vs 豊田高専
花守:この戦いは、広島商船の風鈴崋山に得点能力的に分があるという下馬評でした。風鈴崋山は大きな車輪が特徴的ですが、機体の下におもりを載せて重心を低く寄せているので、突進して機体が傾いても転倒しないようでした。
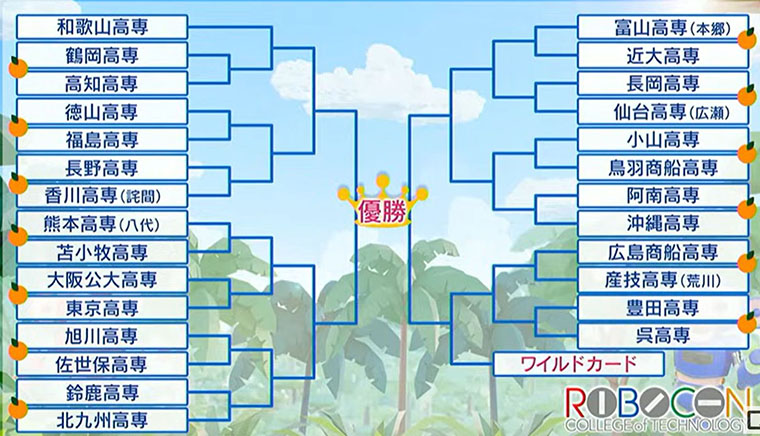
【準々決勝】トーナメント表
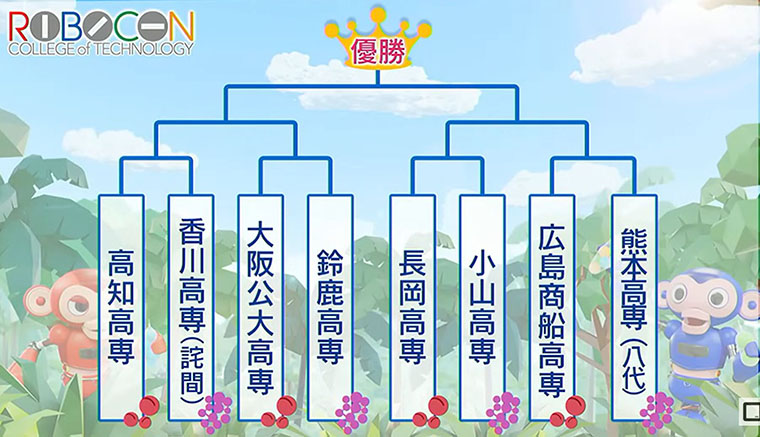
第1試合 高知高専 vs 香川高専(詫間)
花守:準々決勝の第1試合は、高知のfruity bearと香川のFlawlessという四国同士の戦いになりましたね。この試合は、そこそこ重心が高く、脚の上下で段差を越えるという同じ機構のミラーマッチでした。ほぼ速度も同じぐらいでした。準々決勝ぐらいになると、どれも高レベルな仕上がりにしてきますので機体の差がつきにくかったです(https://youtu.be/dDdRVrF7438?t=16124)。
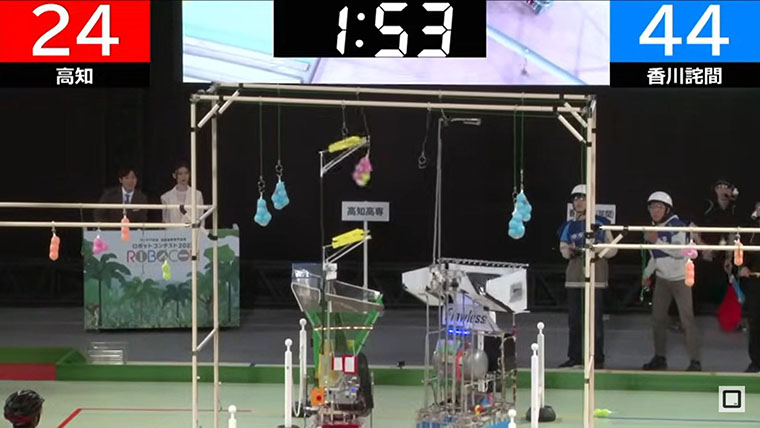
和田:fruity bearはおたすけアイテムのアームが2本、Flawlessは1本でしたが、この状況ではフルーツの収穫にあまり影響がありませんでした。香川はブドウを1個採れた段階で、30秒を残して帰還したのは英断だったと思いますが、ミックスフルーツを落としたことが痛手になりましたね。最終審議でベスト4に勝ち進んだのは高知でしたが、本当に僅差の良い勝負でしたね。
第2試合 大阪公大高専 vs 鈴鹿高専

第3試合 長岡高専 vs 小山高専
花守:第3試合は戦い方もコンセプトも対照的な機体の戦いですね。小山のワンダフルケーキ君はゾーンごとに機体のマカロンのカラーが変わっていますね。青ゾーンになるとマカロンも青くしています。こういう細かい拘りは好きです(笑)。

第4試合 広島商船高専 vs 熊本高専(八代)

和田:この試合は、どちらもミスらしいミスはなかったですね。ここまで勝ち上がってきたチームは実力も伯仲しています。あとは耐久力の勝負でしょう。段差の衝撃も確実に吸収する機構でないと、だんだん機体が壊れやすくなってきますからね。
【準決勝】トーナメント表

第1試合 高知高専 vs 大阪公大高専
花守:準決勝の高知と大阪公大の戦いですが、やはり公大がいち早くセンターゾーンには入りましたね。高知のfruity bearは、準々決勝で鈴鹿が大阪公大と対峙したときの作戦に倣った形ですが、外周を2周回って着実にフルーツを拾っていく作戦。それに見合うスピードがありました。

第2試合 小山高専 vs 熊本高専(八代)
和田:小山は準決勝まで来れたのでOBとしても嬉しかったですね。自分は5年間かけて3試合ぐらいしか戦えなかったので、ここまで試合ができて羨ましいです。この試合でも外周だけで60点をコンスタントにあげて安定した戦いぶりでした。とにかく丁寧に戦って、ワンチャンを狙おうとしていました。

【決勝戦】大阪公大高専 vs 熊本高専(八代)

最終的にセンターすべてのフルーツを採って、400点を取った大阪公大が優勝しました。おめでとう!。

ここまで、すべての戦いを振り返ってきましたが、やはり勝負の運に左右された戦いも数多くありました。戦いに「if」はありませんが「あのときトラブルがなければ」「こう戦っていたら」ということも脳裏をよぎったでしょう。最後に全国大会まで勝ち進んできた、すべてのチームの健闘を称え、観るものすべてに感動を与えてくれたロボコン大会に感謝の意を表したいと思います。今年も感動をありがとうございました!
井上猛雄
産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、株式会社アスキー入社。「週刊アスキー」副編集長などを経て、2002年にフリーランスライターとして独立。おもにエンタープライズIT、ネットワーク、セキュリティ、ロボティクス、組込み分野などを中心に、Webや雑誌で記事を執筆。主な著書は、「災害とロボット」(オーム社)、「キカイはどこまで人の代わりができるか?」(SBクリエイティブ)など。





関連記事
-
 知識・Tips
知識・Tips高分子の相構造形成を利用することで導電性接着剤の銀フィラー含有量の低減が可能であることを実証 (兵庫県立大学 岸肇教授)
2026年03月30日 -
 知識・Tips
知識・TipsCFRPに追いつき、追い越す?!“軽くて強い”だけじゃない「熱可塑性炭素繊維強化プラスチック(CFRTP)」とは (金沢大学 立野大地准教授)
2025年12月26日 -
 知識・Tips
知識・Tips難接着からの脱却も。スーパーエンプラ「PPS」は未来の電化社会を支える
2025年12月19日 -
 知識・Tips
知識・Tips観戦して分かった! ヘボいロボットの突き抜ける衝動 〜ヘボコン2025レポート
2025年08月22日 -
 知識・Tips
知識・Tips「接着」の原理をナノレベルで解明 ~電子顕微鏡による計測と分子シミュレーションの融合~ (東北大学 陣内浩司教授)
2025年08月08日 -
 知識・Tips
知識・Tips5大エンプラの中で最も新しい「ポリブチレンテレフタレート(PBT)」~電気絶縁性で世の中の電化に貢献~
2025年03月31日 -
 知識・Tips
知識・Tipsニーズに応え高性能化を続けるエンジニアリングプラスチック(エンプラ)~もっと強く もっと長寿命に~
2025年03月29日 -
 知識・Tips
知識・Tips安藤さんと趣味~プラモデルとDJにあこがれています~
2025年03月28日 -
 知識・Tips
知識・Tips難接着部材への短時間接着を実現した接着システム「セメダインPPXセット」
2025年03月26日 -
 知識・Tips
知識・Tipsエンジニアリングプラスチックへの接着性に優れたウレタン系弾性接着剤「UT100B」
2025年03月22日
タグ一覧