ものづくりLoversのためのメディア
「2023国際ロボット展」で、全国の高専からロボットと教材が一堂に!
本格的なリアル開催となり、大盛況で幕を閉じた「2023国際ロボット展」。今年は過去最高の654社・3508ブースが出展し、産業用からサービス用までの最新ロボットが一堂に集結しました。その中でも、高専ロボコンで知られる全国の国立高等専門学校から初めてロボットに関する研究・教育教材が紹介されました。当日は、実物の研究と教材、パネル展示などで13のテーマがありましたが、ここでは主に展示品を中心に説明します。

全国の高専からロボットを中心にした研究・開発内容の展示と教材などが出展された。こういった試みは今回初だという。
ロボット技術を含めたSIerを育成するプログラム教材を20高専で開発
まず東京高専(多羅尾進教授)のブースでは、Society5.0型未来技術人財を育成する「GEAR5.0/COMPASS5.0」の「ロボット分野」における取り組みについて紹介していました。同校では、拠点校の北九州高専(久池井茂教授)や18校の協力高専、ファナック、安川電機、川崎重工、デンソーといった主要ロボットメーカーと共に、ロボットSIerを育成する2つの教育プログラムを推進しています。
1つ目のプログラムは、メカトロニクス製作実習を通じて、ロボットSIerの仕事を疑似的に学習する「ロボットシステム統合化開発演習」です。専用テキストを作り、全15回の授業によって、ユーザー視点での要件定義から、仕様策定、設計、実装、テストまでのシステム統合開発プロセスを模擬・実践できるものです。

「ロボットシステム統合化開発演習」の教材と専用テキスト(写真上)。このほかにも「ロボット知能化演習」の教材が開発されている。とても良い教材なので、大学や専門学校でも使えるだろう。
もう1つのプログラムは「ROS」(Robot Operating System)を題材に、ロボットの自己位置と環境地図を作成する「SLAM」(Simultaneous Localization and Mapping)などの知能化を総合的に学ぶ「ロボット知能化演習」の教材開発です。
ロボットSIerの仕事は「技術の格闘技」とも呼ばれており、さまざまな分野の知識が必要になりますが、一朝一夕で技術者を育てられません。そこで本プログラムでは、高専の学習の中の限られた時間内で、最大限効率的に濃縮された教育を実施し、ロボットを社会実装できる人財を育成するための新しい授業に挑戦しているとのことです。
実践的で複雑な工場ラインのシステムを総合的に学べる教材を開発!
同様の趣旨に沿って、函館高専(中村尚彦准教授)の生産システム工学科機械コースでも「FA-SIer実験」の教材を展示していました。これまではロボット制御、ラインのシーケンス制御というように個別に学習していた内容ですが、実際の現場ではこれらを融合した設計が求められます。そこで同校では、新しい学習教材を開発しました。

ロボットSIerを育成する函館高専の実践的な教材。生産ラインに流れてくるワークをロボットで把持して別のラインに送るシステムを構築する。
この実験装置は、ロボットアーム×2台とベルトコンベア×2台がセットになっています。まず1台目のロボットアームでワークをピッキングしてコンベアに載せ、終端まで運ばれたら、2台目のロボットアームによって、そのワークを横のレーンに渡すというシーケンシャルな操作を行うというもの。
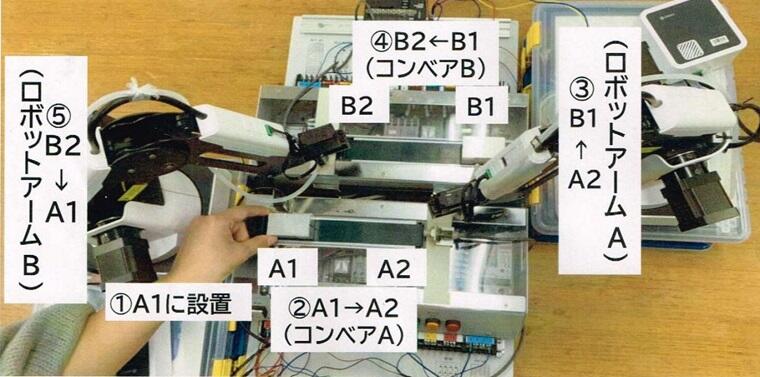
実験装置の説明とワーク搬送の流れ。実際の工場現場を想定した構成(ロボットアームとコンベアー各2台)で、社会に出てからすぐに応用が利く教材になっている。
同校では、この装置を利用して6回の実験を行い、以下の課題を習得してもらうそうです。
・ロボットアームに関する順運動学・逆運動学の導出
・Python言語を利用した制御プログラムの作成
・PLCを用いたシーケンス制御
・ロボットアームによるPick&Place制御
・画像処理によるPick&Place制御
・コンベア機材とロボットアームの統合
日本の産業界は、ロボット単体での開発は強いのですが、システム全体を有機的に構築できる人材が少なく、もっと増やしていく必要があります。 このような教育は、ロボットSIerとしてのインテグレーション能力を養成するカリキュラムとして有用でしょう。
水素配管の亀裂などを渦電流によって自動的に探し出すロボット
佐世保高専と鈴鹿高専(佐世保高専 西口廣志准教授・長嶋豊特命教授、鈴鹿高専 板谷年也准教授)の共同ブースでは、水素配管の亀裂を非破壊で探し出すユニークなロボットを展示していました。プラントなどの高圧水素配管は、水素によってパイプが特有の亀裂を起こしやすくなります。しかし、従来の非破壊検査技術では、この種の亀裂を発見することが難しいという課題がありました。そこで両校では、安心・安全で低コストな水素エネルギー社会に向けて、水素配管の亀裂を非破壊で検査する「水素配管探傷ロボット」を共同開発しています。
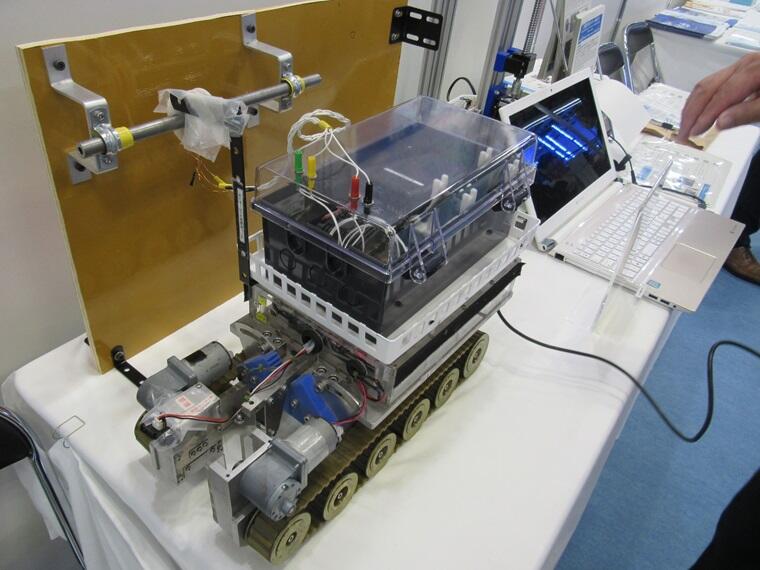
佐世保高専が開発したクローラ式の水素配管探傷ロボット。縦方向の配管にも対応するオムニホイール式のロボットも開発しているという。
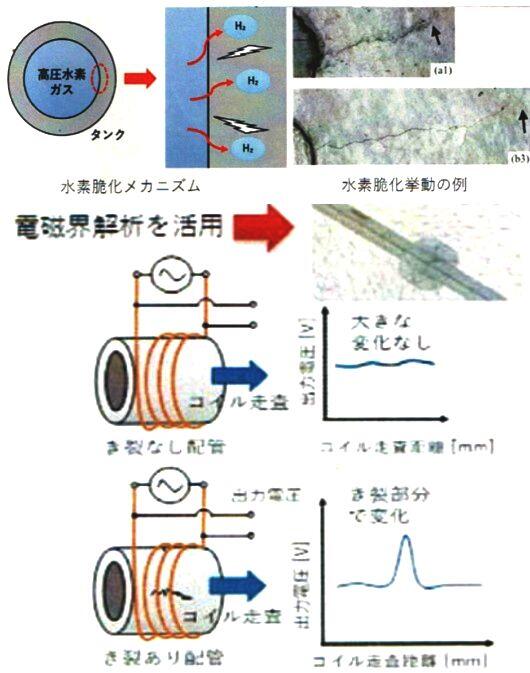
配管の傷は渦電流の変化で発見する。コイル電流から発生する磁界の相互作用により、配管に渦電流が流れる。これを観察することで、異常がある亀裂部分を発見できる。
この移動ロボットに探傷ユニットを取り付けており、現在のところφ14mmの鉄パイプの亀裂発見に成功しています。本システムにはシングルポートコンピュータの「Rasperry Pi4」と、Digilent社のアナログ回路万能計測器「AnalogDiscovery2」を採用し、検査をIoT化しています。検査データはAWSに保存して、リアルタイムで非破壊モニタリングを実現しているそうです。
もう1つのロボコンにも注目! 福島の復興を加速する人財を育成する「廃炉創造ロボコン」とは?
東北の復興を願って、毎年開催されている「廃炉創造ロボコン」について紹介していたのは福島高専(鈴木茂和教授)です。2011年に起きた福島第一原子力発電所の過酷事故を受けて始まったロボコンで、この年末にも第8回目の廃炉創造ロボコンが開催されたばかりです。毎年の課題に従って高専生が競い合う大会で、今年の課題は「原子力建屋内を模した高所の高線量エリアの除染作業を有線の遠隔ロボットで行う」というもの。
具体的には、高さ2700mm、幅1000mmの壁上部をクリーンにするために、傾斜やグレーチングが設置された環境をロボットで移動します。実際の除染は、壁の表面を「はつる」(削る)ことで放射性物質を取り除きます。本大会では、指定のペンで壁の模造紙を塗りつぶし、作業の精度を評価します。実現場での作業を想定し、段差の乗り越えや、引き回したケーブルの管理などもポイントになります。ちなみに今年の最優秀賞は小山高専でした。同校は3年連続で最優秀賞を受賞しています。
今回の展示では、福島高専が第5回大会で最優秀賞(文部科学大臣賞)を受賞した廃炉ロボットを展示していました。
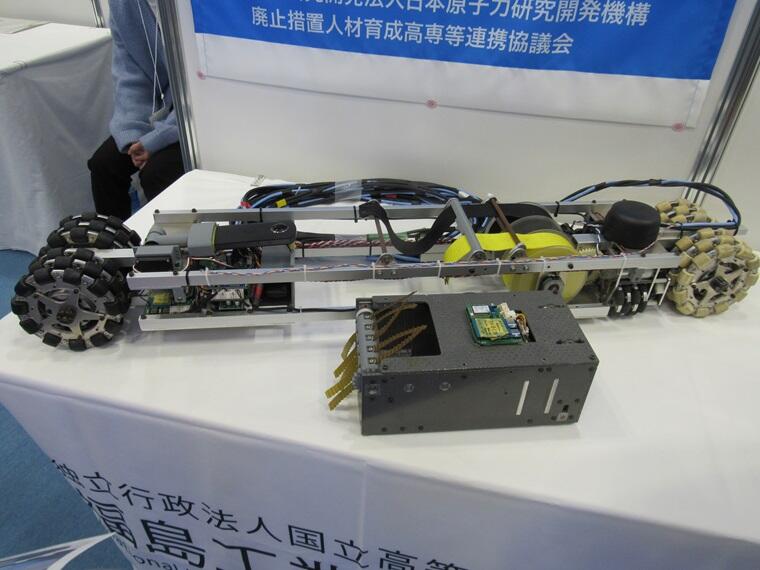
福島高専の廃炉ロボット。原子力発電所内の配管を通る細長い親機(写真奥)と、親機から分離してデブリを回収する子機で構成される。親機には複数輪のオムニホイールを搭載。
また同校がアトックス(https://www.atox.co.jp/)との共同研究で最優秀賞を受賞した「情報収集小型ロボット」も展示していました。こちらは高線量下の原子力建屋の調査を目的に、足回りには走破性に優れたクローラを採用することで狭い場所でも走行が可能で、サイズ・重量が幅300×長さ475×高さ150mm、約7㎏と小型軽量なロボットになっています。

情報収集小型ロボットは、非GPS下の建屋での自己位置推定や、環境マップ作成のために、3次元LiDARと線量計、前・左右に計3台のカメラを搭載。カメラ映像は解像度を落として短時間で伝送できる。
人の運動をアシストする新しい義肢や、無理のない動作矯正システム
津山高専(西川弘太郎准教授)のブースでは、無動力システムを用いた空気圧義手・義指などを展示していました。この新しい義肢の研究の画期的な点は、電源やコンプレッサなどの動力源が要らないことです。MP関節(第3関節:指の付け根の関節)の屈曲動作によって圧縮空気を生成し、指の2つのアクチュエータを動作させる仕組みです。シンプルな構成のため、安価で軽量な義肢となります。

無動力システムを用いた空気圧義手・義指。第3関節の屈曲により、空気を送って把持力を常時作用させる仕組み。バックドライブ機構で対象物を落とさずに柔軟につかめる。
和歌山高専(津田尚明教授)のブースでも、人間の能力を支援・拡張するロボットとして「改善意識を誘発する控えめな動作矯正システム」を出展していました。本システムは、人間の動作を矯正する装置ですが、従来のようにトレーナーが手取り足取り、患者さんを誘導しながら矯正するものではなく、適切なタイミングでロボットが控えめな刺激を適切に与えることで、患者さんの改善意識を自発的に誘発して、自然に動作を改善できるようにする工夫を凝らしています。
たとえば、松葉杖に振子を取り付けて意図的にバランスを崩すことで、患者さんに歩行感覚を訓練をさせる「転倒覚提示装置」や、見守り・付き添うロボットに伴走されながら患者さんが歩行し、歩行のモニタリングからリアルタイムに改善方法を教示するシステムなどを開発しています。特に筆者が面白いと感じたのは「運筆動作矯正装置」です。筆やペンなどの筆記用具の位置を正すために、モータで手首を左右から圧迫して、動かしたい方向に導いたり、振子の駆動で重心位置を移動して誘導力を提示できます。

モータの力や振子の駆動を利用して筆記用具の位置を正せる「運筆動作矯正装置」。これを使えば、文字が美しく書けるようになるかもしれません!
また熊本高専(清田公保教授、松尾和典准教授)が開発中の「視線入力制御によるセルフケア・ロボット」を展示していました。このロボットは、重度肢体不自由の障がい者の方々でも、自助により利用できる視線入力制御機能を用いたセルフケア・リモートケアロボットです。海外製品よりも、かなりローコストで、精度の高いロボットを実装することで、障がい者の方と介護者の方のQoL向上が期待できます。

視線入力制御によるセルフケア・ロボット。重度身体障がい者の方々やヘルパーさんの負担を軽減できるセルフケア・リモートケアロボット。
海のデータを蓄積し、養殖に役立てられるクラウドサービスを実用化
鳥羽商船高専(増山裕之准教授、アイエスイー)は、商船高校らしくユニークなIoT海洋モニタリングシステム「うみログ」を紹介していました。これは、海上に設置して水温・水位推移・画像などのデータを観測するIoTシステムです。
昨今の気候変動により、海洋環境が変化し、漁獲量や養殖の生産量に影響が出ています。また、漁業者の高齢化や担い手も不足しており、属人的でなく客観的なデータを用いた「海の見える化」が求められています。そこで同校では、海洋観測器に付いた各種センサーで環境データを取得し、モバイル回線を通じて30分ごとにクラウドにデータをアップロードする「うみログ」を開発したそうです。

IoT海洋モニタリングシステム「うみログ」。太陽光パネルでシステムを稼働させる。収集した環境データは、モバイル回線を通じてインターネット経由でクラウドに送られて蓄積される。
本システムは、カメラ部(海上と水中)、センサー部(標準:水温・GPS、オプション:水圧・フロート・クロロフィル・溶存酸素・塩分濃度・濁度・流速・有害プランクトンなど)、通信制御部(LTE/4G回線)、電源部(ソーラーパネル)で構成されています。センサーから収集した環境データは、クラウドに蓄積され、ユーザーがスマホやPCなどから、インターネット経由でアクセスできます。
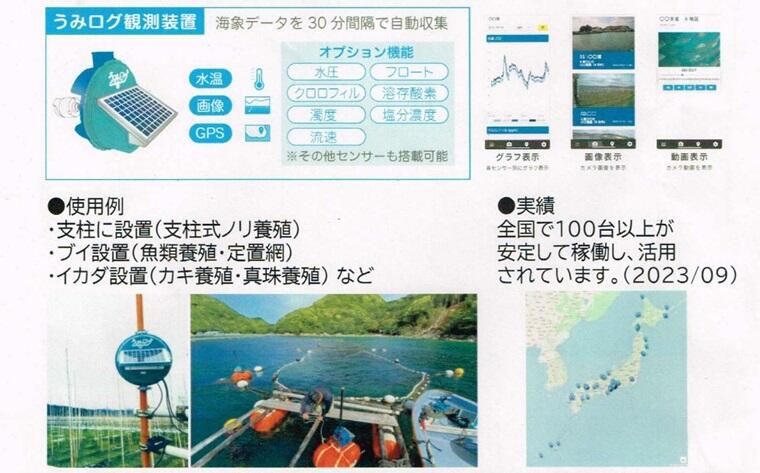
「うみログ」は、すでに全国で100台以上(2023年9月時)のシステムが安定稼働しており、ノリ、カキ、真珠、魚類といった養殖を支援するために利用されている。
展示ブースでは「うみログを導入してから魚類の収穫量が増えた」と喜びの声をあげる漁師さんのインタビュー動画も流れていました。日本のような海に囲まれた島国では、水産業のIoTシステムは今後ますます重要になるでしょう。
パネル展示のみでしたが、地中やコンクリートなどの内部の非破壊検査に利用できる「シミュレーション×AI全自動地中レーダロボット」(仙台高専 園田 潤教授)も先進的でユニークな研究でした。従来この種のロボットは、地中レーダを照射し、その反射波から物体の有無などを非破壊で調査していました。しかし検査装置は人がマニュアルで牽引しており、また反射波の画像を判別するのも専門家でなければ難しいという課題がありました。
そこで仙台高専では、衛星測位(GNSS)により決められた経路に沿って全自動で調査できるロボットを開発しました。また画像判別については、画像AIを利用して物体の大きさや自動的に行えるようにしています。AIの学習モデルをつくるためには、大量の教師データが必要になるため、生成AIを利用してシミュレーション画像を大量につくって利用しているとのことです。
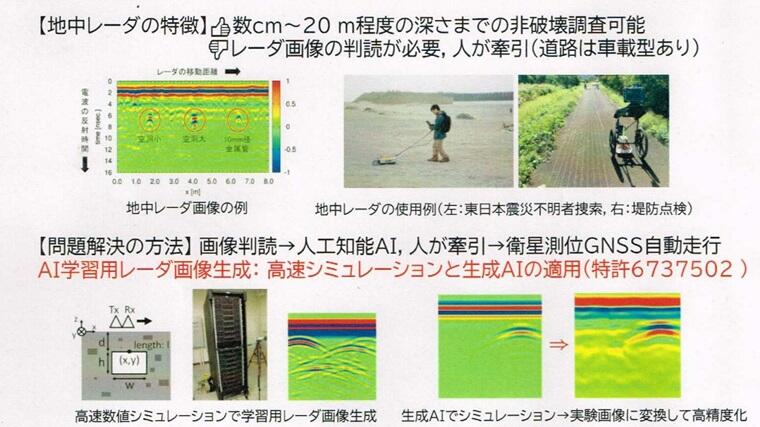
仙台高専の「シミュレーション×AI全自動地中レーダロボット」。道路トンネルなどのインフラ点検、水道ガス埋設管の検出、災害探索などに応用できる。
そのほかにも「協調診断ロボティクスの創発/社会実装ロボット教育の実践」(沼津高専 青木悠祐准教授)、「浴槽内を自動で清掃するロボット」(北九州高専 古野誠治准教授)、「浅川地下壕の三次元デジタルアーカイブと平和学習教材の開発」(東京高専 冨沢哲雄准教授、鈴木慎也准教授)、「COVID-19重症化予測簡易測定の自動化に向けて」(沖縄高専 池松真也教授、村山裕子特命助教、安田直子特命助教、伊波幸紀特命助教)といったユニークな研究も紹介されていました。
普段は、なかなか高専の研究成果や学習教材をじっくりと見る機会はありませんが、こういった実社会に貢献する研究・開発・応用や、高専生への高度な人材教育が進められていることを本展示会で知ることができた点は、筆者にとっても大きな発見となりました。高専の高度な教育によって、将来的に日本をリードする数多くの人財が育ってくれることに期待したいと思います。
井上猛雄
産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、株式会社アスキー入社。「週刊アスキー」副編集長などを経て、2002年にフリーランスライターとして独立。おもにエンタープライズIT、ネットワーク、セキュリティ、ロボティクス、組込み分野などを中心に、Webや雑誌で記事を執筆。主な著書は、「災害とロボット」(オーム社)、「キカイはどこまで人の代わりができるか?」(SBクリエイティブ)など。





関連記事
-
 ものづくり
ものづくりあの「ガシャッ」をもう一度! ファミコンのカセット交換みたいなセンサーガジェットを作った
2026年07月21日 -
 ものづくり
ものづくりAIの時代に、手を動かす意味——ICOMA生駒崇光のプロトタイピング哲学
2026年07月10日 -
 ものづくり
ものづくり先輩からつながった“強豪校”への思いが大会史上“最高”のゲートに結実!(熊本高専熊本キャンパス)
2026年06月26日 -
 ものづくり
ものづくり3種の接着剤を使いこなせ!セメダイン使い分け工作選手権
2026年06月19日 -
 ものづくり
ものづくり出来上がった瞬間に“無”に帰しようとする時間をものづくりで表現する−−−−造形家・竹谷隆之が語る造形への思い
2026年05月29日 -
 ものづくり
ものづくり【高専ロボコン2025全国大会レポート(後編)】~ロボコン大賞ほか、個性がキラリと光る各賞受賞のロボットを大紹介!
2026年05月15日 -
 ものづくり
ものづくり小学生のロボコンが抜群に面白いのはなぜか!?その答えがここにある「小学生ロボコンを振り返る会 2025」
2026年04月24日 -
 ものづくり
ものづくり30年分のロボットを保管する小山高専「なんなら全部動きます」
2026年04月17日 -
 ものづくり
ものづくり稼げる工房の作り方——「ここにしかない」をつくる独創的な方程式とは
2026年04月10日 -
 ものづくり
ものづくり電子工作×推し!光るフロートで推し接着剤をパレードさせる
2026年04月03日
タグ一覧