ものづくりLoversのためのメディア
群馬高専のロボット研究会に聞く! 高専ロボコン2022全国大会ベスト4まで進出した「SDGs」の創意工夫とは?
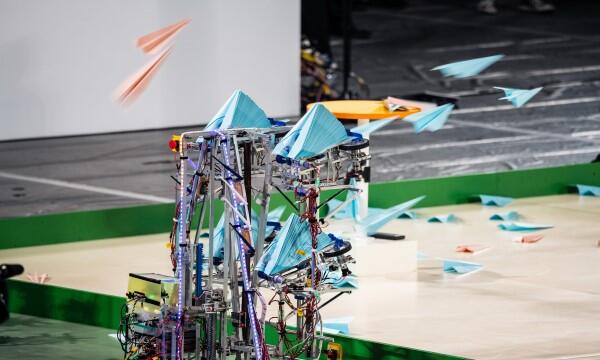
毎年、全国から精鋭が集まり、素晴らしい戦いを見せてくれる「高専ロボコン」。2022年の大会は「紙飛行機をロボットで飛ばす」という超難問が与えられ、学生もロボットの製作に苦労したようだ。しかし全国大会に勝ち上がってきた強豪チームのすべてが紙飛行機を難なく飛ばす実力を持っていた。その中でもキラリと光るチームがいくつかあった。その1つが群馬高等専門学校(以下、群馬高専)のロボット研究会だ。
同校は高速連射タイプのロボット「SDGs」で準決勝まで進み、のちに優勝校となる奈良高専を最後まで苦しめた。スタートダッシュで一番難しい奥の筒に紙飛行機を入れ、一時は奈良高専より先にVゴール(すべてのターゲット紙飛行機を着陸させる)を決めそうな勢いだった。あと一歩で勝利を逃したが、高速で気持ちよく紙飛行機を飛ばすパフォーマンスに観衆は魅了された。そこで本稿では群馬高専ロボット研究会の1、2年生を中心に、同校のロボットの製作体験や、普段の部活動について話をうかがった

群馬高専ロボット研究会。今回、話をうかがったのは、機械工学科と電子情報工学科1、2年生の皆さん。
Vゴール狙いは、あとから考えた! 強豪の奈良高専を苦しめたSDGsのポテンシャル
群馬高専のロボット研究会には、数十名のメンバーがおり、主に1年生から3年生までが中心に活動している。4年生以上になるとメインの活動から退き、アドバイス役になるという。そのためロボットの設計・開発は、2、3年生が主導して行い、もっぱら1年生はサポート役になる。ロボットを製作するにあたっては、機械、回路、制御という分野ごとに班が編成されるそうだ
ロボットを製作するので機械系の学生が多いが、電子回路や制御ソフトウェアも重要になるので、電子情報系の学生もいる。
メンバーは機械工学科と電子情報工学科の学生の混成チームだが、人数としては機械工学科が多い。機械班のほか、回路班と制御班は一体で活動している。普段は高専ロボコンの活動だけでなく、「関東春ロボコン」(春ロボ)や「交流ロボコン」などにも出場するため、1年を通じて忙しく、技術の研鑽に余念がないとのこと。今回の高専ロボコンでは2チーム6名体制で、異なるタイプのロボットを開発して戦いに臨んだ。全国大会に出場したのはAチームだが、Bチームのロボットもユニークで魅力的だったので後ほど紹介する。
高専ロボコンに向けた製作期間は約半年ほど。足回りの機構系や駆動系は毎年ほぼ同じ構成なので事前に製作し、要となる出射部などの開発に時間をかけたという。本大会では、部員全員で折った紙飛行機は、本大会の準決勝で国技館の床一面に広がった。そのシーンが目に焼き付いている観衆も多いかもしれない。手折りの飛行機数は5000枚以上で、試作まで含めたら1万近くに及んだというから、その労力にも驚かされる。特にAチームは高速連射で紙飛行機を飛ばすため、部員が家に折り紙を持ち帰って家族にも手伝ってもらったそうだ。
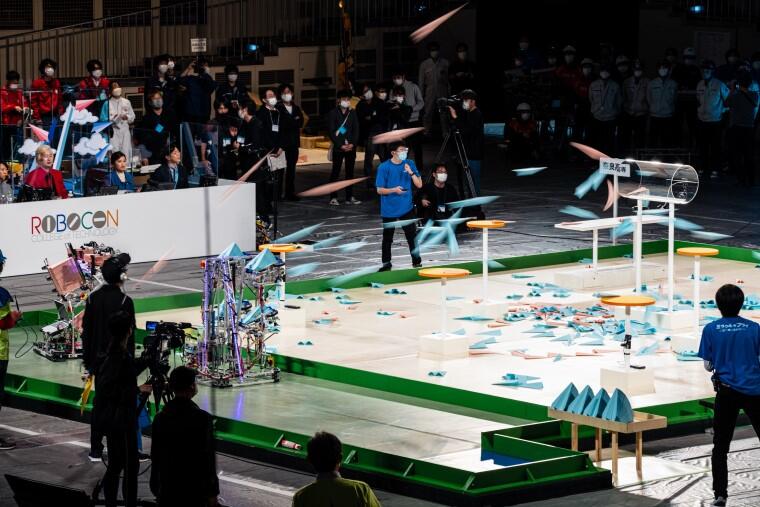
本大会 準決勝の模様。奈良高専との戦いに一歩も引かず、逆にVゴールあと一歩まで追い詰めた。試合後には紙飛行機が床一面に広がった。
今回の高専ロボコンのテーマは紙飛行機を飛ばすことだったが、例年に比べてかなり難易度が高いものだったようだ。メンバーの一人は「素材が柔らかい紙なので、ロボットで扱うことが難しく、それを飛ばすのはさらに大変でした。最初は本当にロボットを完成できるかな? という雰囲気でしたが、先輩がたが実験と改良を繰り返すうち、徐々に紙飛行機を飛ばせるようになりました。本大会で用意した紙飛行機は、搬送時に形が崩れないように専用治具をつくって運びました」と振り返る。

紙飛行機を保管・搬送するための専用治具も製作した。紙飛行機の形を崩さず、すぐにストッカーに装填できるように小分けにしている。
同校は当初、高速連射で滑走路に飛行機を着陸させ、高得点を稼ぐ作戦で戦おうと考えていたが、途中から難易度の高いVゴール狙いに戦法を変更した。地区大会から全国大会へ進む中で、Vゴールの手ごたえをつかんだからだ。Vゴールを決めれば、得点に関わらず勝利を手にすることができる。実際に本大会で同校はVゴールを決めていた。強豪の奈良高専との闘いでも、あと一歩のところでVゴールに届きそうな勢いだった。
群馬高専の「SDGs」が紙飛行機を高速出射できた機構部の秘密を探る
ここからは、全国大会に出場したSDGsの機構部について詳しく見ていこう。前出のようにSDGsは高速連射が大きな特徴で、4つの出射台から繰り出される紙飛行機は一試合で1500機にも及ぶ。3名の操縦者が各ターゲットに狙いを定め、各ストッカーに収納された200機の紙飛行機をすべて発射できる能力を有する。試合中に紙飛行機の出射速度や方向も臨機応変に調整でき、高い位置から飛行機を滑空させる展開機構を備えていた。
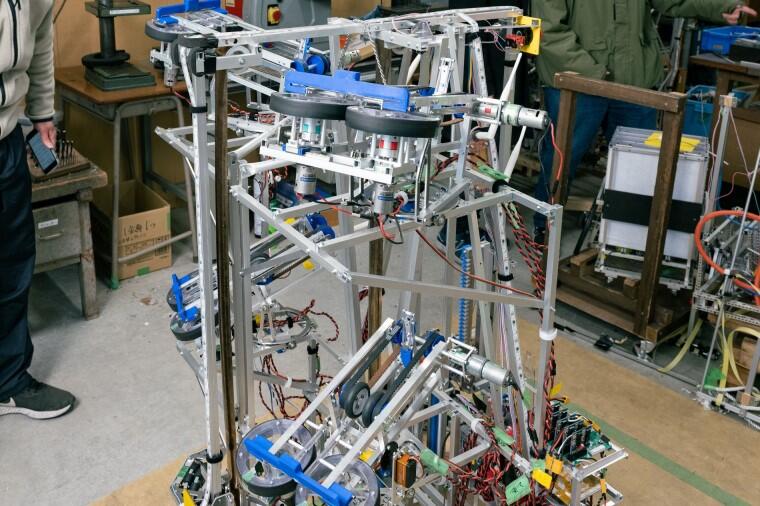
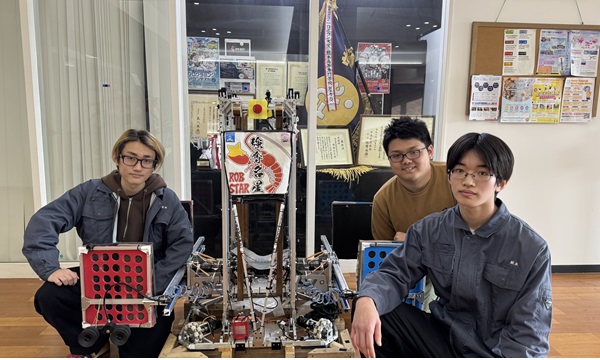
ベスト4入りしたSDGsの機体。骨子はアルミ角材で構成されている。4つの出射台が付いており、試合時間内に1500機もの紙飛行機を飛ばせる。
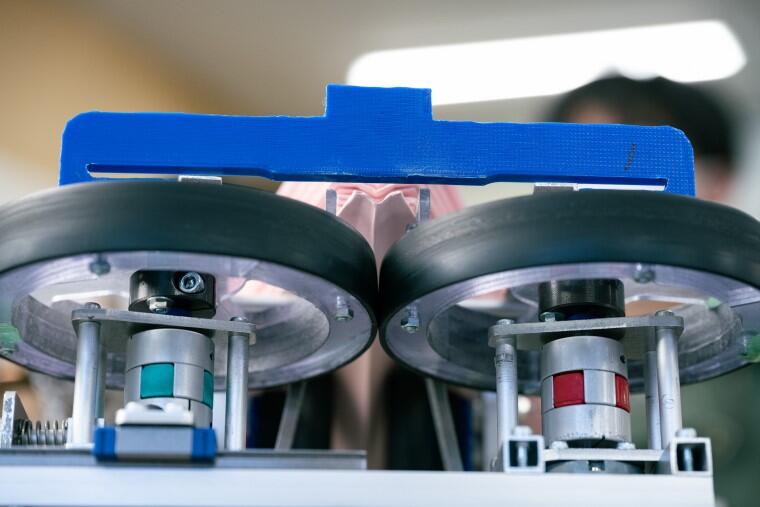
機構部のキモとなるのは、やはり飛行機を飛ばす出射台だろう。ロボットの出射台は主に「ローラー式」「押出式」「回転式」などに分けられるが、本大会では多くの高専がローラー式を採用していた。群馬高専のSDGsも2対のローラを高速回転させながら、その間に紙飛行機を挟んで出射する機構を選んだ。

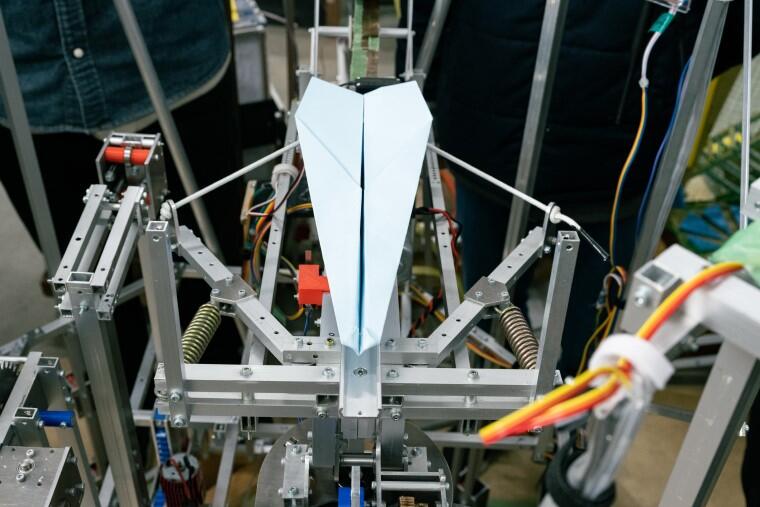
出射台のアップ。2対のローラーを組み合わせて、モータで高速回転させる。ローラ同士の間に紙飛行機を挟んで勢いよく出射する。
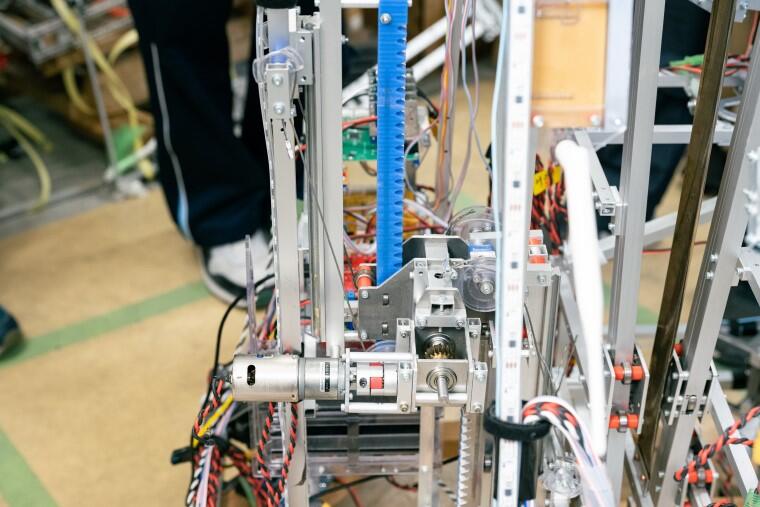
地区予選までは、右側と左側で異なるタイプの出射部を装備していたが、本大会に向けて左右対称に変更した。紙飛行機を出射するまでの流れは次のとおりだ。ストッカーに装填された紙飛行機を一枚ずつタイミングベルトで移動させて、出射台のローラーに導く。そこで紙飛行機をローラーで挟み込み、その回転で紙飛行機を飛ばす。タイミングベルトなどのコンポーネントは、部室にあったものを再利用したそうだ。

出射台の裏側からのアップ。タイミングベルトとプーリーによる紙飛行機の送り出し機構。当初、駆動源にはサーボモータ利用していたがDCモータに変更。
一番苦労した点は、紙飛行機にタイミングベルトの力がうまく伝達しなかったこと。1年生の部員は「最初は紙飛行機の上に金属のおもりを置いてベルトに流していましたが、なかなか上手くいきませんでした。紙とベルトの摩擦が関係しているため、飛行機を押さえるときに微妙な力の加減が求められます。そのため紙飛行機を薄い紙に変更するなど、搬送の伝達性をよくするために、先輩たちが何度もトライ&エラーを繰り返しました」と語る。
紙飛行機が飛び出す「出射高」も実験を重ねたという。出口の隙間が開きすぎると紙飛行機が2枚重なって同時出射され、逆に隙間が狭すぎると紙飛行機が詰まってしまう。そのため隙間を微妙にアジャストしなければならない。飛行機が重なって搬送される時の厚みよりも薄くする必要があるため、1mm以下に収めている。この出射部は3Dプリンターで製作したそうだ
出射口の正面アップ。紙飛行機がスムーズに飛び出すように、出口のスキマを1mm以下にして微妙に調整したという。青い樹脂部品は3Dプリンターで製作。
出射台の回転ローラーにはマブチモータを使用し、「PWM制御」でモータ速度を制御している。ちなみにPWM制御とは、モータに印加するパルス電圧(電流)の幅の比(デューティ比)を変えることで平均電圧を調整し、速度やトルクを制御する方法だ。紙飛行機を搬送するベルトの駆動は当初サーボモータを使っていたが、飛行機をできるだけ早く出射部に送るためにDCモータに変更したそうだ。そのぶん制御は難しくなるが、あえて高速出射のために採用した点が成功のポイントになった。
見えないところでも一工夫! 全国大会では使わなかった機能も多数あり
この定荷重バネは、一定の曲率で曲げられた長尺の板バネで、直線に引き伸ばすときに生じる戻り力(荷重)が最大荷重に達すると、ストロークにかかわらず一定になる(ドラム1/2回転で最大出力)。定荷重バネは長尺ストロークでも小径ドラムに収まるため場所を取らないというメリットがある。

SDGsの展開機構。V字のフレームを組み合わせて展開するようにしている。曲げモーメントを受けにくく、変形しにくい構造になるように設計したという。
展開機構部のアップ。ラック&ピニオン機構で高トルクでリフトアップする予定だったが、力が不足していたため、あとから定荷重バネを追加したという。

一定の曲率で曲げられた長尺の「定荷重バネ」。直線に引き伸ばすときに生じる戻り力(荷重)はストロークにかかわらず一定になる。
次に足回りだが、本体を移動するための車輪には「オムニホイール」を使っている。これは以前の機構を踏襲した。ただし、駆動をスムーズにするためにDCモータを使い、PID制御を採用していることがポイントだ。PID制御はP(比例)、I(積分)、D(微分)の要素があり、これらを組み合わせて制御応答性を良くしたり、安定性を増したりする仕組みだ。ここではロボット本体が動くとき、特にIの積分要素によって駆動時の安定性を確保したそうだ。
足回りのアップ。定番のオムニホイールを採用。車輪の回転軸に対して90°の角度でローラが取り付けられており、任意の方向への移動を可能にする。
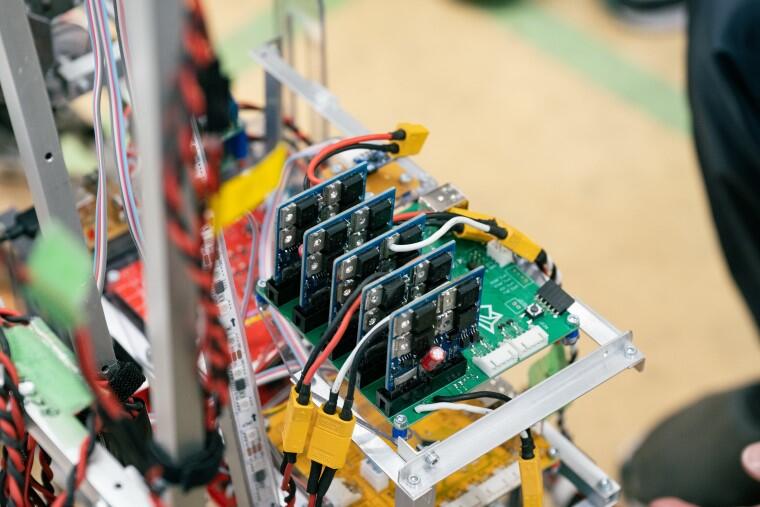
詳細については分からなったが、基板にHブリッジを組むための4つのパワートランジスタが見えるので、足回りの駆動回路と思われる。
またジャイロセンサも搭載しており、ロボット本体が移動するときに常に正面に向くように制御。つまりロボットが移動しながら、紙飛行機を一定方向にロックして出射できるわけだ。これも本大会では利用しなかったが、見えない部分で多くの工夫を凝らしていることが理解できた。ほかにもレーザー光の反射から距離や形などを計測する「LiDAR」(Light Detection And Ranging)や、ソフトウェアプラットフォームに「ROS」(Robot Operating System)を採用するなど、ロボットの完成までに、さまざまな試行を繰り返したという。
Bチームのロボット「託飛」は、あえてカタパルト式のユニークな構造を採用
群馬高専は、もう1台Bチームが「託飛」(タクト)というロボットを製作して大会に臨んだ。関東甲信越地区大会で特別賞 (牧野フライス製作所) を受賞したが、残念ながら全国大会には出場できなかった。しかしAチームのSDGsとは異なるユニークな機構だったので、こちらも少し触れておきたい。

群馬高専Bチームのロボット「託飛」(タクト)。関東甲信越地区大会で特別賞 (牧野フライス製作所) を受賞したユニークな機体。
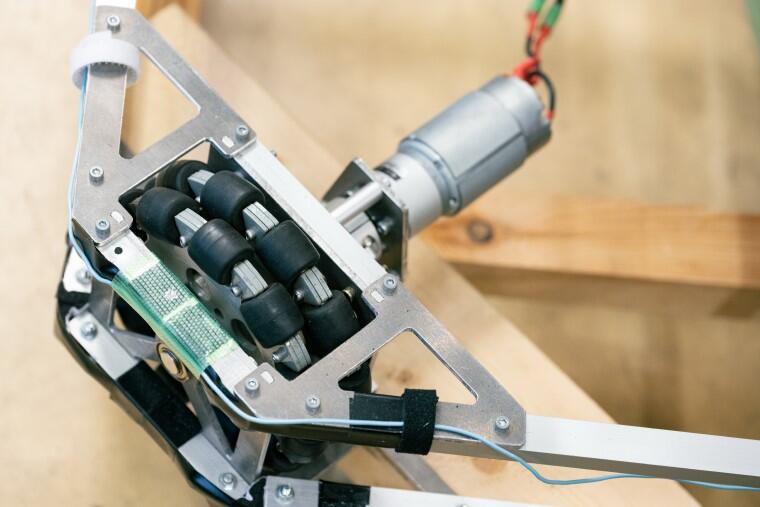
託飛の特徴は、高速連射のローラ式ではなく、一機ずつ紙飛行機を装填して飛ばす2基のカタパルト(投石)式を採用している点だ。大昔の投石機のようにゴムを引っ張ったり、バネの圧縮で押し出したりすることで、紙飛行機を飛ばす。設計担当者によれば「(ローラ式が多いので)あえて逆張りで他とは異なる方式を採用しました」とのこと。
託飛の出射台の正面アップ。バネとゴムの力で紙飛行機を押し出すカタパルト方式を採用。1機ずつ装填するため大量得点は狙えないが機構が面白い。
紙飛行機は後方の台座へ移動するが、ラチェット機構を採用しており歯車は一方向にしか回らないように工夫している。カタパルト式の場合、ゴムやバネの力によって紙飛行機の飛距離が変わるので、コントロールは難しい。あえて難しいアプローチを取ったチャレンジ精神は大いに賞賛したい。クルマの窓の上げ下げ用のパワーウインドーモータも取り付けた。これはウォームギアが組み込まれたモータなので、高トルクを発生できる。また各種歯車は耐久性を考慮して、市販品ではなくNC工作機でモジュールの大きなものを自作したという。

ほとんどの歯車はNC工作機械で自作。市販品の歯車は高いこともあるが、最近は3DCADソフトで簡単に設計できるという。
地区大会では使用しなかったが、出射の方向を決める回転機構や、Aチームと同様に機体を展開する機構なども備えており、随所にメカの工夫が見られる面白いロボットに仕上がっていた。
1年生から工作機械や設計の基本を学び、「やってみなはれ」の精神で実践に備える
ロボットのプログラミング関係は、組み込みの定番であるCやC++といった言語を主に利用している。プログラミング学習は、情報系だけでなく、機械系でも授業カリキュラムに入っているが、ロボット製作を通じて早いうちから学ぶことで抵抗感もないそうだ。
1,2年生はプログラミングや機構設計には直接タッチしていなかったが、「先輩の姿勢を見て学ぶところが多かった」という。あるメンバーは「プログラミングも機構設計も、先輩方は思いついたらすぐに実践していました。可能性があるものなら、とにかく作って実験しながら改良するという姿勢は、私たちも真似ていきたいです」と語る。

高専ロボコンに参加すると、機械系でも早い段階からプログラミングを学べるため、メカトロニクスの総合的な知識を習得できる。
実際にロボコン研究会の部室には、モノづくりを実践する十分な環境もある。旋盤、フライス盤、ボール盤、ジグソー、さらにCNCや3Dプリンターなどがあり、ロボットに使う素材を製作・加工できる。実は同研究会には、市販のアルミ角材を利用してロボットを組み立てるという伝統がある。中空角材のアルミなので加工もしやすく軽いからだ。そこに穴をあけナットで結合していく。

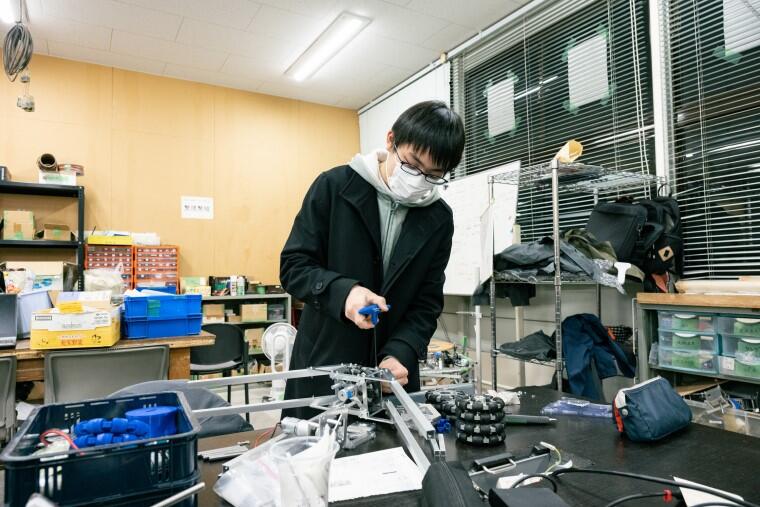
ロボット研究会に入部すると、先輩が1年生に旋盤やフライス盤などの使い方を伝授してくれる。機械の製作はもっぱら1年生のタスクだ。

複雑な部品を作るNC工作機械のオペレーションもお手のもの。CADソフトには「Gコード」を吐き出せる(変換できる)JW_CADを利用しているという。

いまや高専生の必須アイテムである3Dプリンター。複雑な形状を生成するには、それなりに時間も掛かるが、コストパフォーマンスが良い。
加工したアルミ角材を組み合わせてメカを組み立てる。ときには穴の大きさや配置、公差が合わず失敗することもあるが、チャレンジ精神で後輩も活躍。
ロボット研究部では、3年生を中心に機構設計を行う。ただし、その部材の加工などは下級生に任せているという。ときには穴の配置を間違えたり、公差に収まりきらず失敗することもあるが、その点は大らかで、まずは「やってみなはれ」の精神でチャレンジしているという。部内では講習会が開かれ、早い段階から各種工作機械による加工法を覚えてもらったり、CAD設計ソフトの「JW_CAD」や「SOLIDWORKS」の扱い方もレクチャーしてもらったりしていたそうだ。

SOLIDWORKSによる設計事例。実際にロボコンで使われたものではないが、早い段階からロボット研究会のライセンスで3DCADを扱わせてもらえるそう。
高専ロボコンは、ロボットを開発して競う大会だが、ロボット製作には工場現場の生産ラインのエッセンスが詰め込まれている。たとえば、紙飛行機を搬送するベルトコンベアなどは、社会に出てからすぐに役立ちそうなものばかりだ。高校レベルの早い段階から実践的なモノづくりを体験できる点も高専ロボコンの魅力といえるだろう。今回、取材させて頂いたメンバーが3年生になったとき、どんなロボットが出来上がるのか、いまからその成長が楽しみだ。今後の同校の活躍に期待したい。
井上猛雄
産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、株式会社アスキー入社。「週刊アスキー」副編集長などを経て、2002年にフリーランスライターとして独立。おもにエンタープライズIT、ネットワーク、セキュリティ、ロボティクス、組込み分野などを中心に、Webや雑誌で記事を執筆。主な著書は、「災害とロボット」(オーム社)、「キカイはどこまで人の代わりができるか?」(SBクリエイティブ)など。





関連記事
-
 ものづくり
ものづくりあの「ガシャッ」をもう一度! ファミコンのカセット交換みたいなセンサーガジェットを作った
2026年07月21日 -
 ものづくり
ものづくりAIの時代に、手を動かす意味——ICOMA生駒崇光のプロトタイピング哲学
2026年07月10日 -
 ものづくり
ものづくり先輩からつながった“強豪校”への思いが大会史上“最高”のゲートに結実!(熊本高専熊本キャンパス)
2026年06月26日 -
 ものづくり
ものづくり3種の接着剤を使いこなせ!セメダイン使い分け工作選手権
2026年06月19日 -
 ものづくり
ものづくり出来上がった瞬間に“無”に帰しようとする時間をものづくりで表現する−−−−造形家・竹谷隆之が語る造形への思い
2026年05月29日 -
 ものづくり
ものづくり【高専ロボコン2025全国大会レポート(後編)】~ロボコン大賞ほか、個性がキラリと光る各賞受賞のロボットを大紹介!
2026年05月15日 -
 ものづくり
ものづくり小学生のロボコンが抜群に面白いのはなぜか!?その答えがここにある「小学生ロボコンを振り返る会 2025」
2026年04月24日 -
 ものづくり
ものづくり30年分のロボットを保管する小山高専「なんなら全部動きます」
2026年04月17日 -
 ものづくり
ものづくり稼げる工房の作り方——「ここにしかない」をつくる独創的な方程式とは
2026年04月10日 -
 ものづくり
ものづくり電子工作×推し!光るフロートで推し接着剤をパレードさせる
2026年04月03日
タグ一覧