ものづくりLoversのためのメディア
「高専ロボコン2023 全国大会」レポート(その2)~優勝は逃したものの、ユニークで面白い激熱ロボットたちを大紹介!
高専ロボコンレポート前編では、競技の概要と準決勝に進出した8チームの善戦の模様についてお伝えした。最終的に大阪公大高専の「鴉」が優勝、熊本八代高専が準優勝の栄誉に輝いた。まずは両チームを祝福したい。ただ全国大会に出場してきたチームは、すべてにおいて一芸に秀でたユニークなロボットばかりだった。そこで後編では勝敗に拘らず、各高専チームの思いが詰まった素晴らしいロボットをチョイスして紹介しよう。
ロボットに魂を! 獅子舞が人のように動く沖縄高専の凝ったロボット

まずは沖縄高専のエキシビジョンの様子をご覧いただきたい。
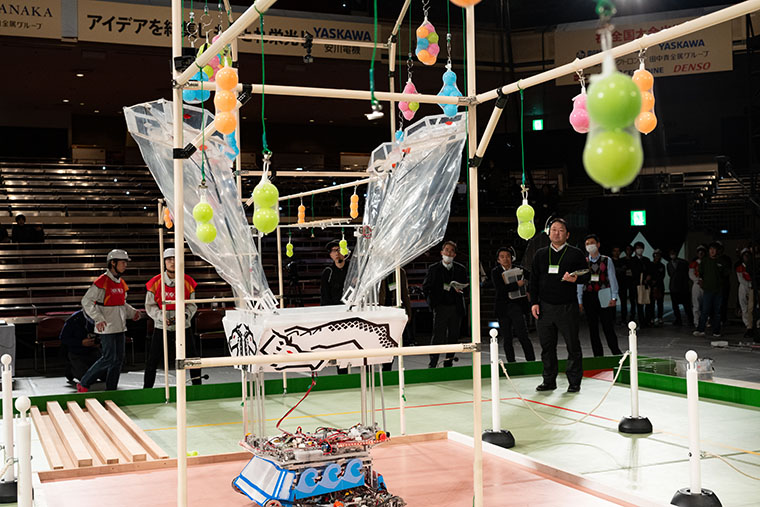
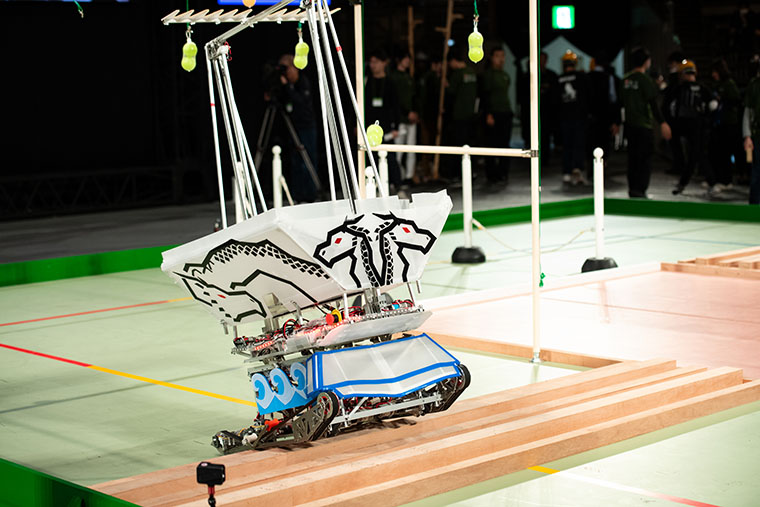
この機体がユニークだった点は、単に得点を稼ぐことだけでなく、観衆に見せるロボットであり、記憶に残るロボットだったこと。同校では、先輩たちが開発してきた「獅子舞」をコンセプトに、ここ数年間その技術を継承しながら進化させてきた点が素晴らしかった。

細かいことだが、同校の技術的なこだわりを強く感じたのは獅子舞の首の動きだ。首については縦と横の2軸に加え、もう1軸のモータを加えることで斜めに首をかしげる表現ができるため、獅子舞の感情まで伝わってくるような動きになるのだ。

おたすけアイテムは、2021年に参加したときの「オーバヘッドロボ」をイメージしたもので、子獅子舞が上下したり、くるくると高速回転したりして、フルーツを採れるように工夫されていた。

脚まわりについては、高さ調整が可能なメカナムホイールと、ウレタンベルトで作られた柔らかいクローラを採用し、角材の段差を上手に乗り越えていく。またロープについては、上部の獅子舞と下の駆動系が分離・連結している構造で、獅子舞の前脚と後脚を順番に上げながら本体に通していくスタイルだ。
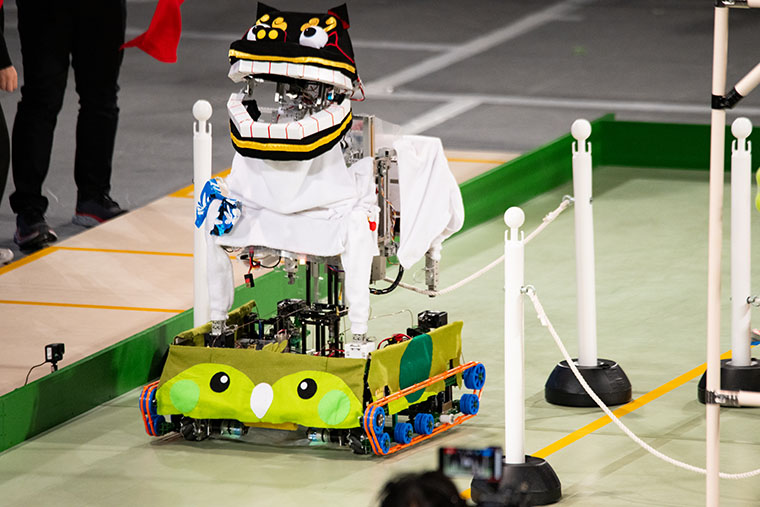
もうひとつ見逃せない点は、都城高専のロボット・カカポを本体のフロント部に組み込み、フィールドに落としたフルーツを食べて回収できる機構を用意したことだ。仲が良い都城高専が予選で敗れてしまったので、彼らのロボットの一部を機体に載せて、一緒に全国大会で戦うという心意気も微笑ましいエピソードだ。

風の吹き上げでフルーツを落とす斬新なアイデアが光った佐世保高専
アイデア倒れ賞を受けた佐世保高専は、アイデアが斬新で個人的にも大好きなチームのひとつだった。

このチームも沖縄高専のように、観客に楽しんでもらうことに主眼をおいていた。エキシビジョンに登場したときは、フルーツを落として観客を大いに沸かせた。
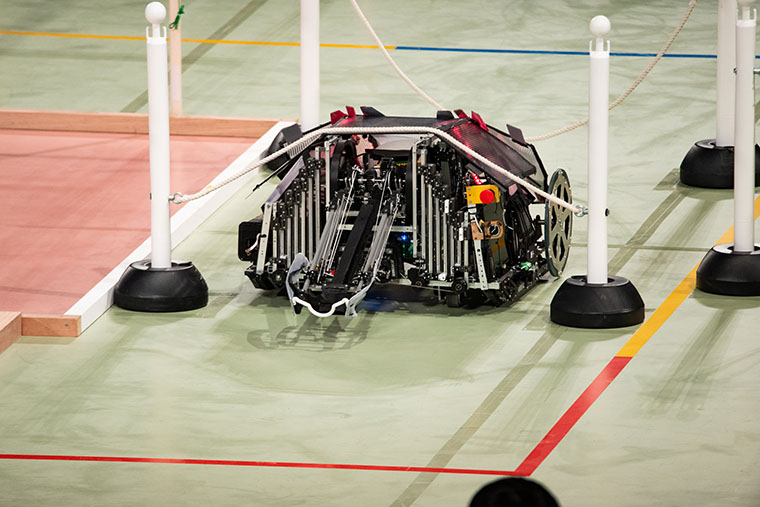
響嵐の素晴らしさは、何と言っても風力を利用してフルーツを落とす機構だろう。同様の発想としては長野高専の「よっこらShot」(その1で紹介)もあるが、佐世保高専は2016年から風力にこだわったロボットを作ってきたという。今回はラジコン飛行機に使れるダクテッドファンを低重心ロボットの中央に配置した。
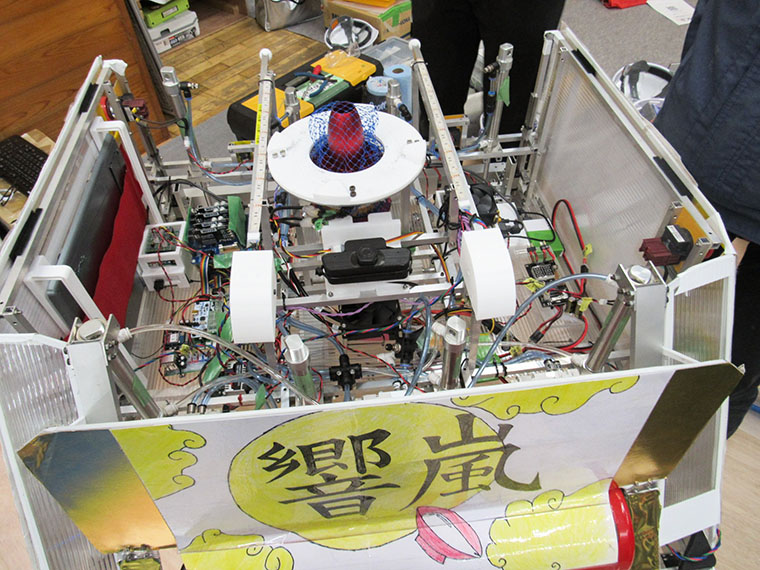
ここから送り出される強風によって、おたすけアイテムが伸展して風洞となって展開し、風を効率よく集めてフルーツを落とすという発想だ。
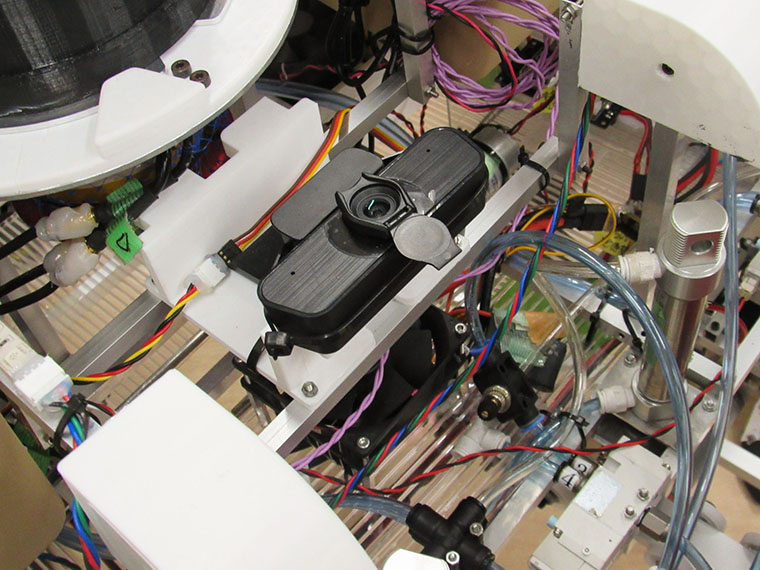
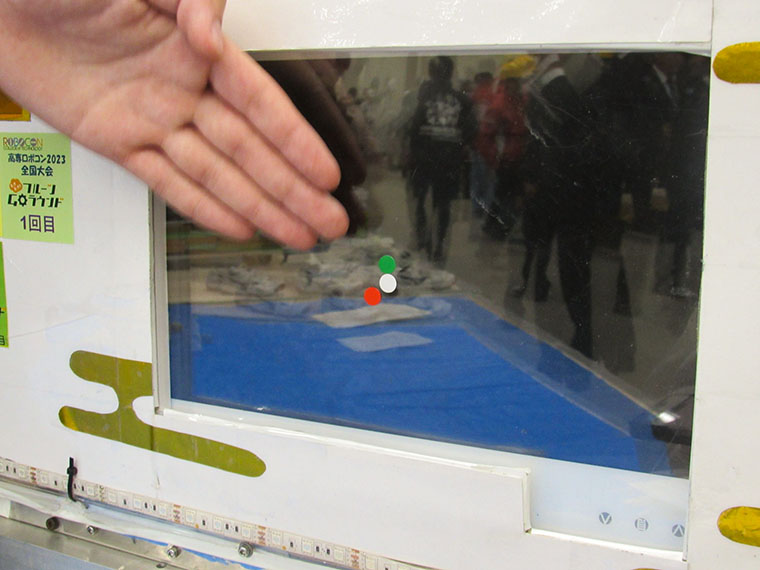
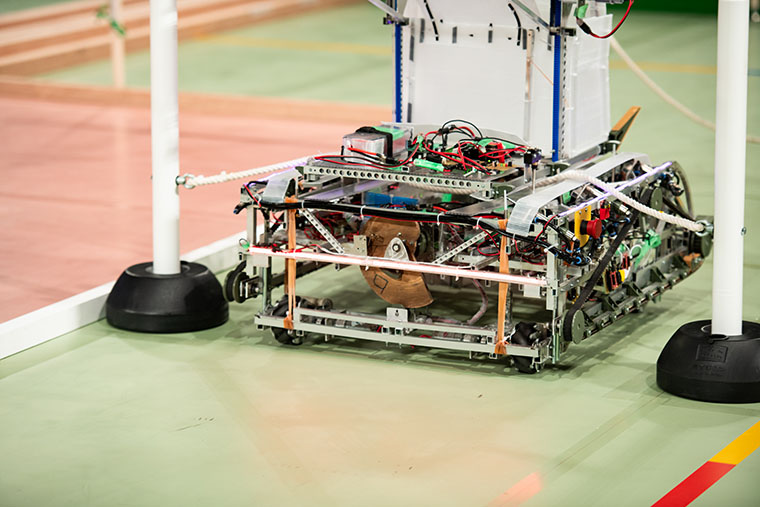
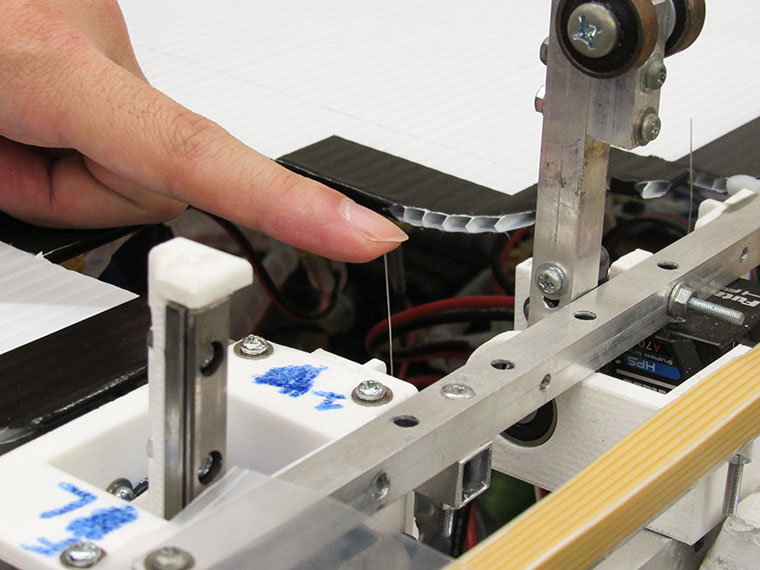
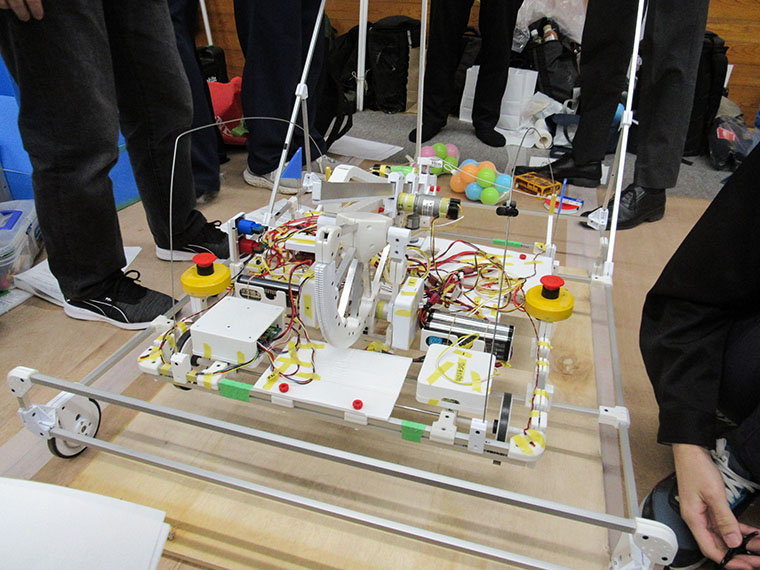
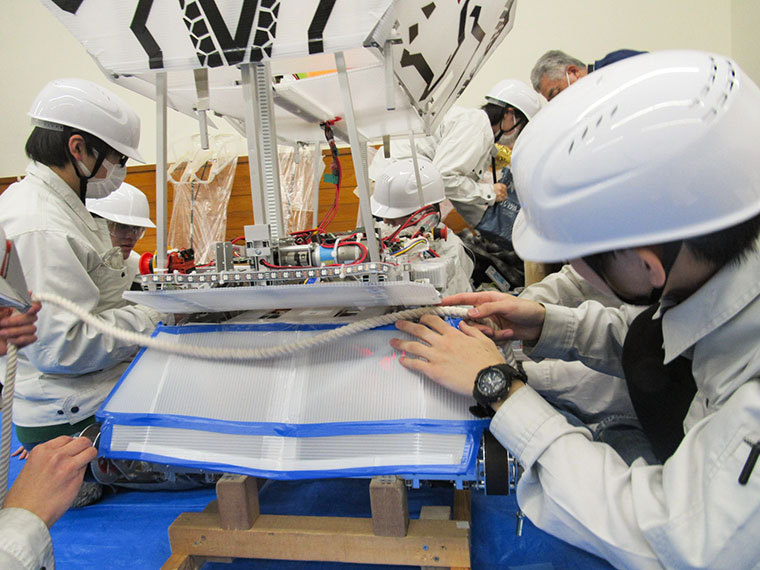
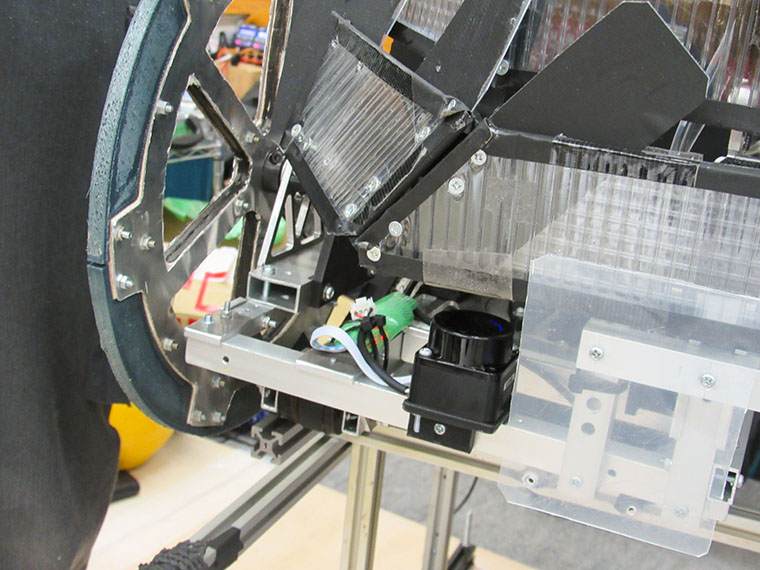
風の強さは各フルーツの高さごとに調整でき、ロボット上部のカラーLEDインジケータと連動。落ちたフルーツはロボット上部のカゴで受け止めて回収するが、どこに落ちるのか予測がつきづらかったようだ。フルーツに風を送る際には機体の位置決めが重要だ。そこでメンバーの目視による指示のほか、上を見渡せるカメラも機体に搭載していた【★写真10】。さらにAIによる画像技術を利用し、ロボット側面のモニタからカラーマーカーでフルーツの種別を判断できるように工夫していた。

障害物に関しては、低車高の重心設計とし、そのままロープの下を潜り抜ける形だ。またエアシリンダの空圧でメカナムホイールを上下させ、角材の段差を乗り越えられるようにしていた。
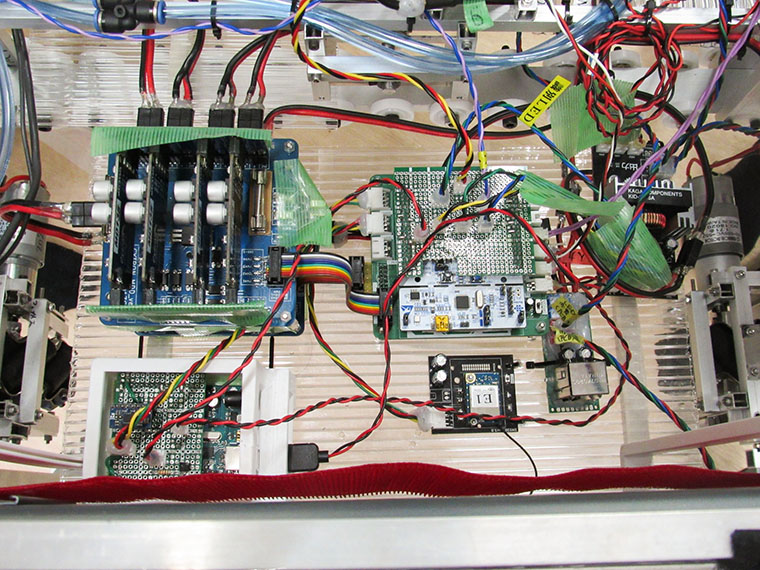
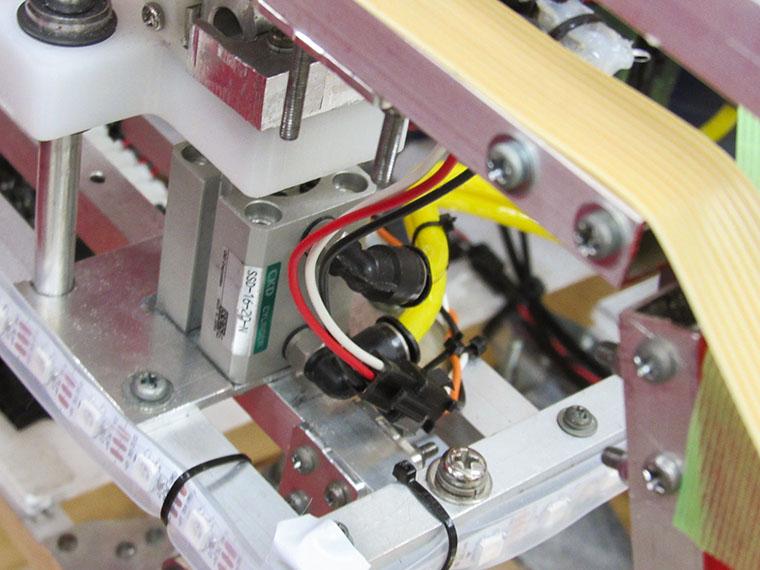
隠れた技術的なポイントとしては、いちからプリント基板を起こして、駆動系の回路を設計したこと。モータから伝搬するノイズでマイコンが誤動作することを避けるために、マイコンと駆動系の基板を分離したそうだ。モータを駆動するために定番のPWM(Pulse Width Modulation)制御を行っており、パワー半導体の高速スイッチング時に、かなりノイズが発生するからだ。さらに無線通信の混線にも配慮し、920MHz帯のLPWA/高速通信モジュール・IM920を採用。ロボットの開発は、ある意味で総合格闘技なので、機構部だけでなく、回路や通信も非常に大切になるのだ。
洗練されたメカ設計で段差越えもロープすり抜けもラクラクこなした東京高専の凄み
東京高専は、メンテナンス性やデザイン性を配慮した設計を心がけており、技術力の高さが感じられるチームだった。

同校のSφPNIR(スレイプニル)の凄い点は、障害物を気にせずに高速でクリアできる機構にある。残念ながら本試合では通信トラブルのため上手く動けなかったが、エキシビジョンで本来の性能を披露してくれた。
SφPNIRが段差を乗り越えるとき、機体を傾けずに水平を保ちながら、何ごともなかったかのようにスルーしてしまうのは見ていて気持ちが良かった。まさに北欧神話に登場する神獣・スレイプニルのようなロボットだった。
メカナムホイールに角材が当たると、受動的に車輪が収納されるようになっているが、この機構は電気的な要素を使わず、メカとゴムだけで収納できる点にこだわりを感じた。勢いに任せて段差を突破する方法もあるが、SφPNIRの場合は振動や衝撃を機体にできるだけ与えない安全設計が大きな特長といえるだろう。
ロープのすり抜けも非常にスムーズだ。機体を上下に分けて連結しており、スキマからロープを通す方式を採用。ロープをセンサで検知して、連結部のジョイントをエアシリンダで順番に自動開閉することで、スピードを落とさずに通せるようになっていた。
おたすけアイテムは、高さ調節が可能な丸棒によってフルーツの位置を合わせられるしくみだ。先端の丸某にS字フックを当てて傾けることでフルーツを外していく。

機体自体は、脚回りで前後の幅を取ってしまうため、サイズ制限ギリギリになるように菱形にしたそうだ。またトロフィのような外装を付け、できるだけ回収口を広くしたり、内部にスロープをつけたりすることで、フルーツを確実に採って、回収時の手間を省く工夫を凝らしていた。

そのほか細かい点になるが、バッテリケースのデザインにも強いこだわりを感じた。フタを回すと電源がオンになり、同時にライトが光るというギミックも面白かった。ロボットに命を与え、あたかも魂が宿るようなイメージだ。
本番形式のエキシビジョンで最高の581点を記録した和歌山高専の実力
こちらもエキシビジョンの動画を御覧いただきたい。やはり剛機果断の得点能力が頭一つ飛び抜けていることがよくわかるだろう。
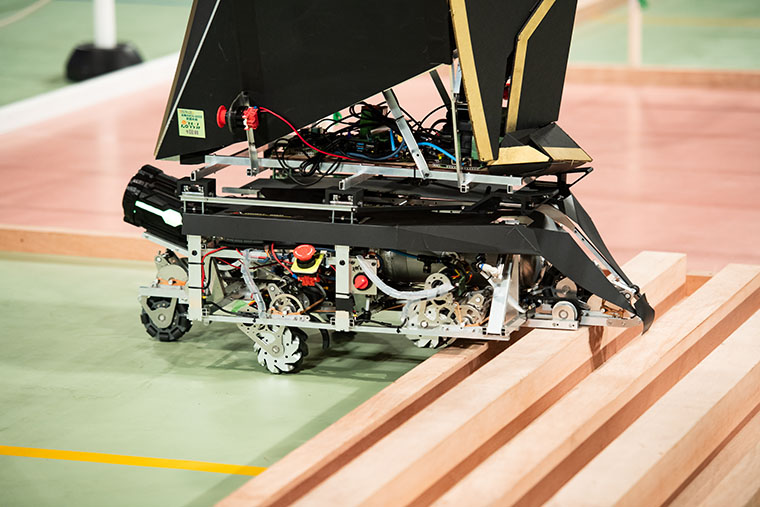
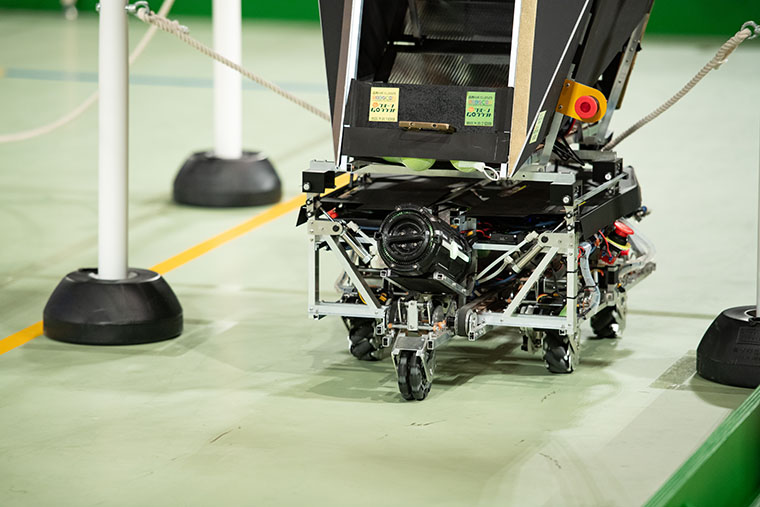
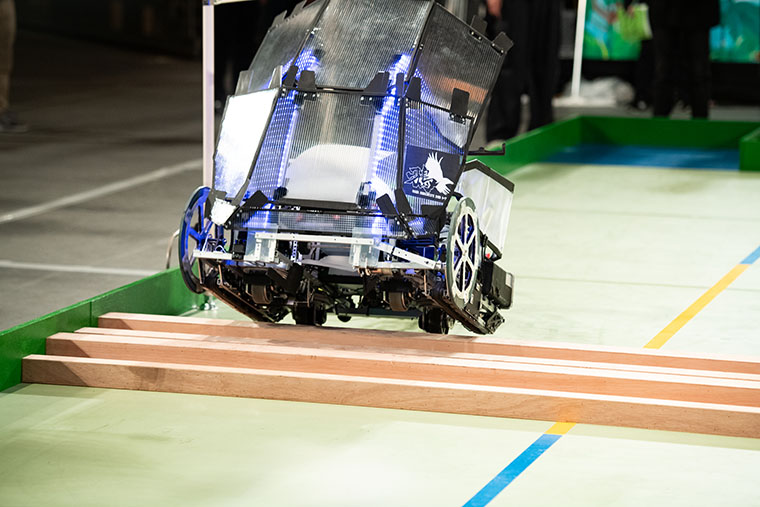
エキシビジョンは、本番と同様に2分30秒の競技形式で行われた。剛機果断はスムーズな段差越えとロープの高速すり抜けで1周目を終え、センターゾーンには40秒弱で到達。2つのアームでセンターゾーンのフルーツを上手に採って1分40秒で一旦スタート地点に帰還。この時点で、すでに490点の高得点をマークしていた。さらにセンターゾーンのフルーツを採りに戻る余裕もあり、最終的に531点という高得点を弾きだした。トラブルがなければ、優勝候補の一角に食い込んでいたことは間違いなさそうだった。
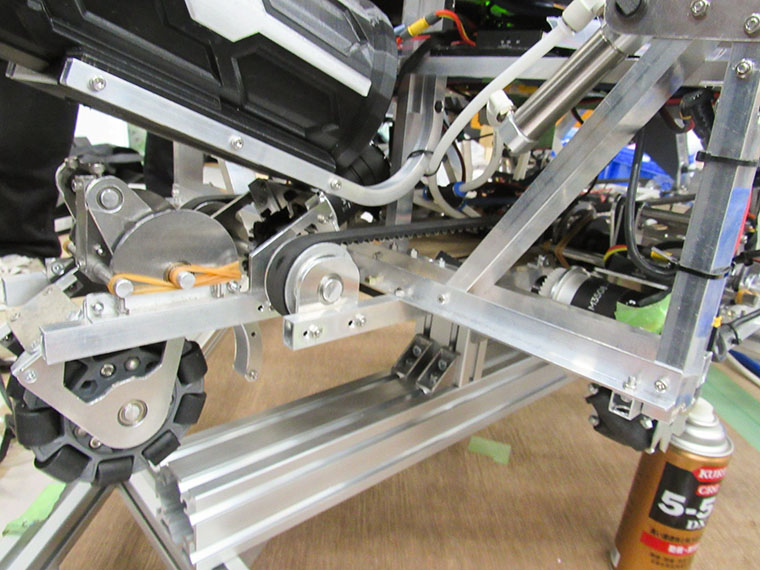
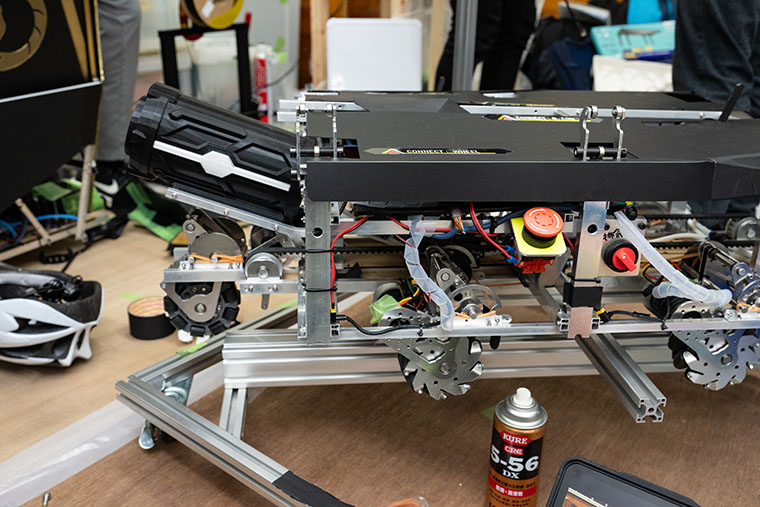
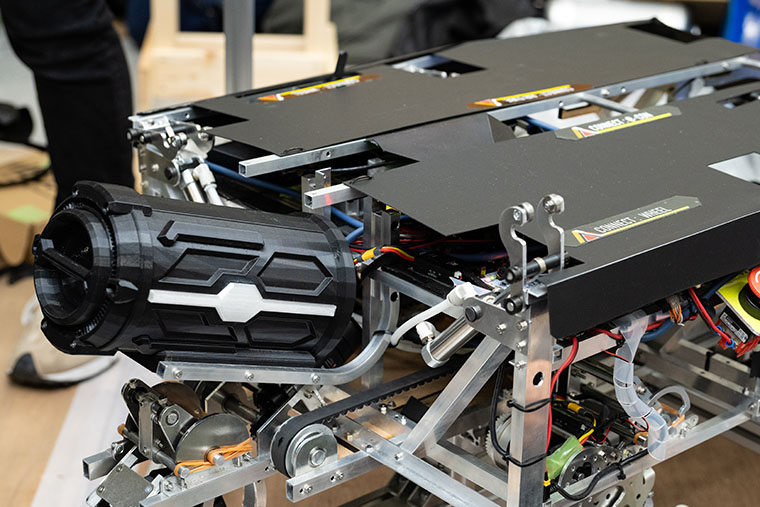
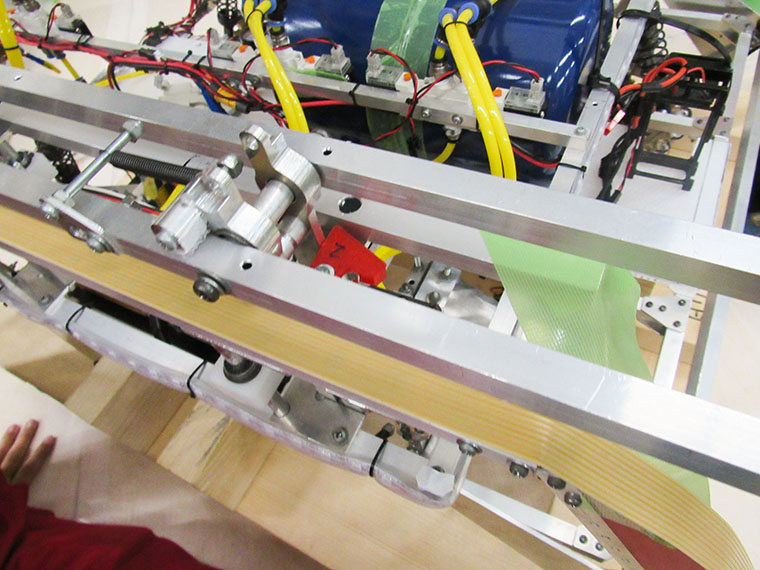
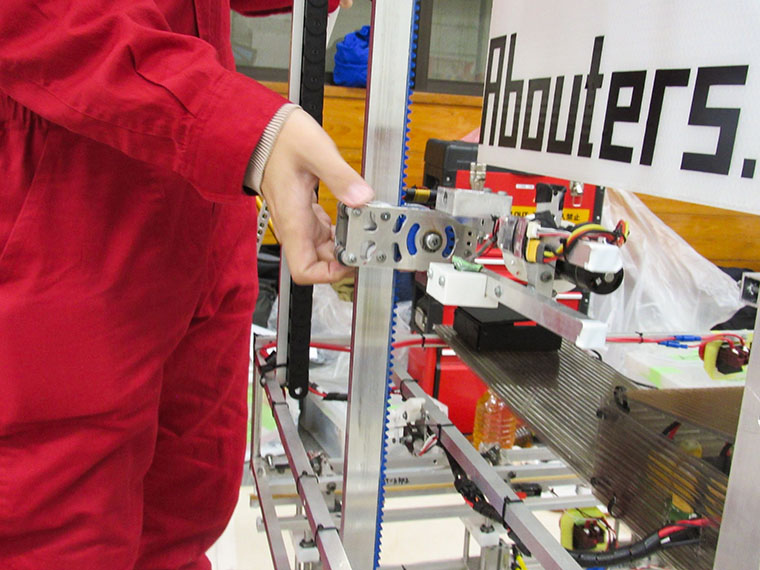
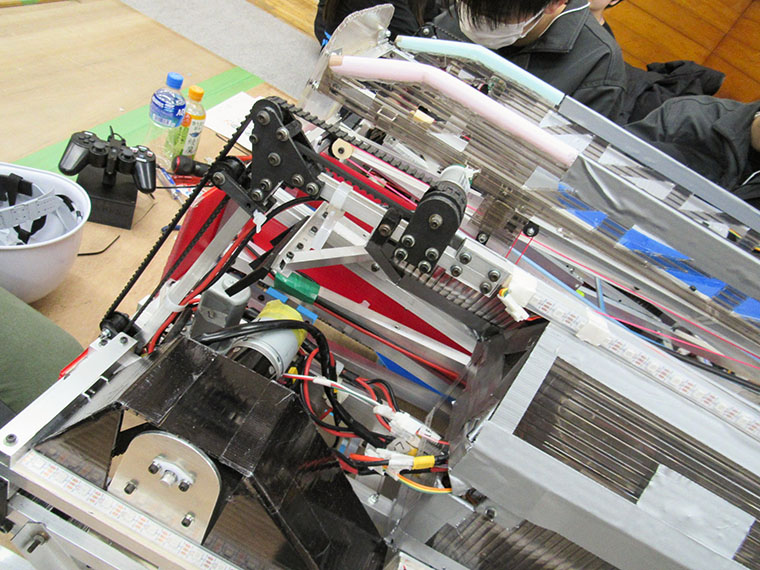
脚まわりは4輪のメカナムホイールとクローラで構成されていた。通常はメカナムでフィールド走行するのだが、木製の大きなカム機構があり、それで前後のメカナムを上下させてクロ—ラに切り替えられるしくみだ。カム設計はシミュレータで行うが、実装時には軌道が計算どおりにいかないこともあるため、トライ&エラーで微調整したという。
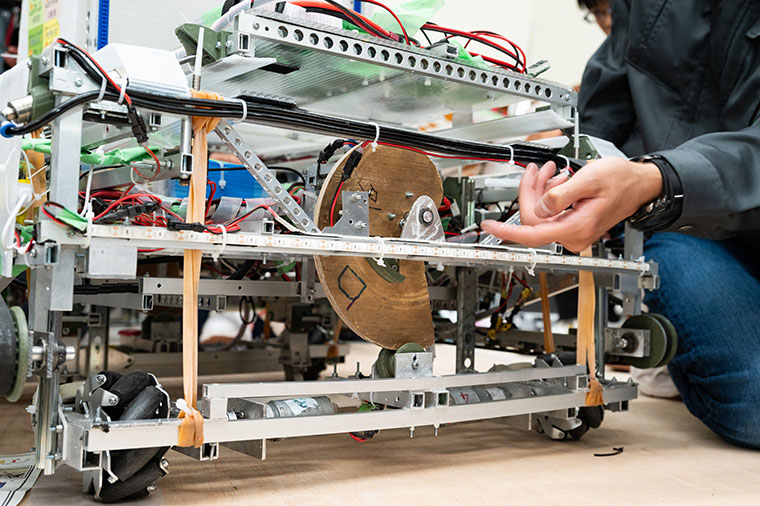

ロープのすり抜けは、フロントに取り付けたエアシリンダで3組の上下ロック機構を順番に解除し、ロープを高速に通していくスタイルだ。しくみ自体は他校のロボットと同様だが、ロープが通るとリミットスイッチが反応し、次のロックも開錠してくれる。このスムーズな連動によって、ロープのすり抜けを実現している。
剛毅果断はフルーツの採り方も上手だった。上部の展開機構はラック&ピニオンで昇降させるが、箱型の回収部が付いたおたすけアイテムを2本ぶん取り付け、カム機構により押し上げて振動を繰り返す。さらに本体側にもカム機構があり、ダブルで振動させることでフルーツを上手く採れる工夫を凝らしていた。また集められたフルーツも2つの取り出し口に分けており、スタート地点に戻ったとき迅速に回収できるように設計していた。


回路系統は、ロープを通すために機体を上下に分離しているため、モータの制御回路系も独立させたそうだ。ただし操縦時には一人のオペレータで対応できるように、下側のメイン回路から上側のサブ回路に無線で信号を送ってコントロールしていた。他チームの上下分離タイプの機体は、オペレータが上下の操縦を別々に担当することが多かった。しかし2人で操作すると、位置の調整とフルーツ採りの操作のコンビネーションが難しくなるため、あえて和歌山では一人で行えるようにしたのだ。
メカナムや遊星ギアユニットまで自作する産技高専(荒川)の超絶技巧に驚愕!
都立産業技術高専(荒川キャンパス)の「Fruits full 2」は「超絶技巧」にふさわしい作りで個人的に驚かされた機体のひとつだった。

「Fruits full 2」も本番では不調だったものの、ぞの技術力の高さが評価されて特別賞(ホンダ賞)を獲った。筆者の視点では特に脚周りの機構部にメーカー顔負けの機械加工を施しており、本当に素晴らしいの一言に尽きた。
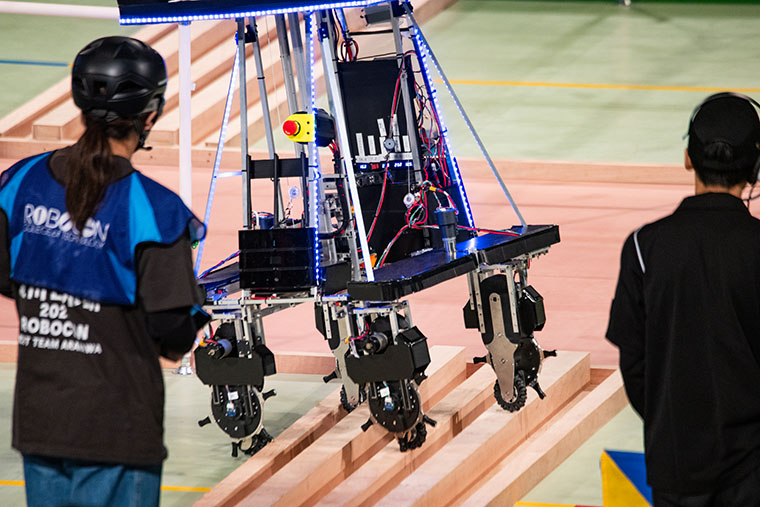
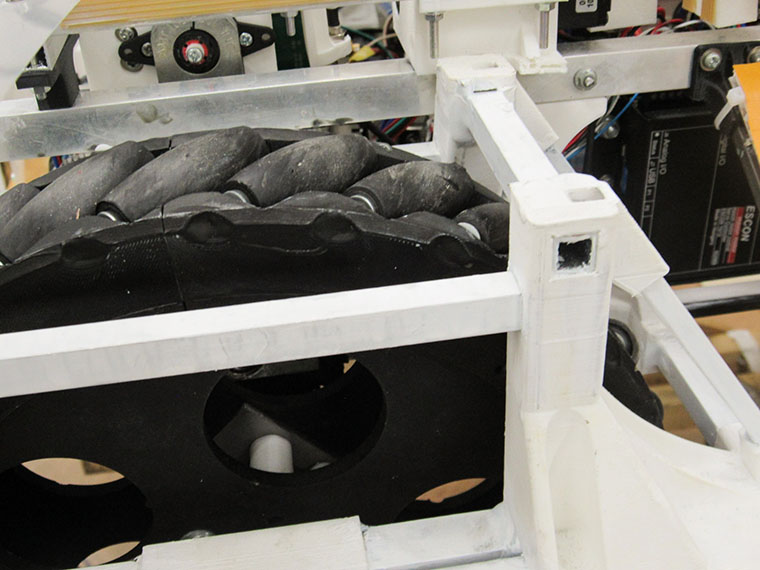
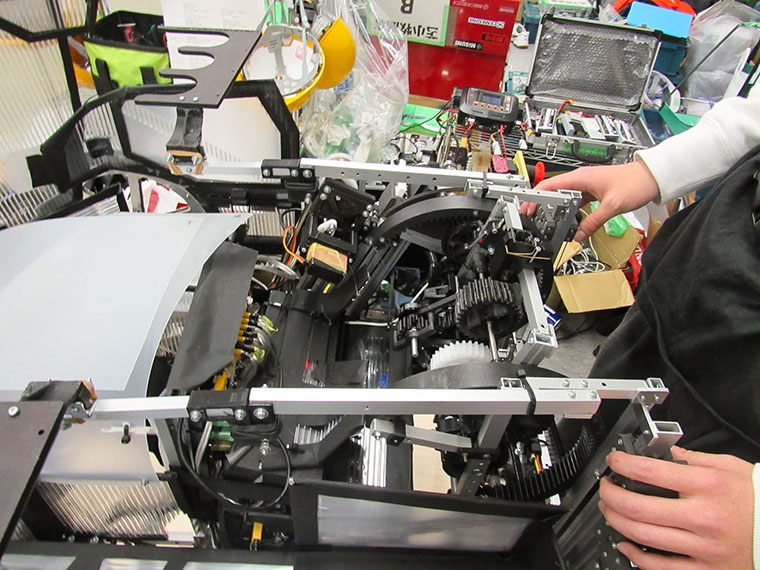
全国大会のためにメカナムホイールをすべて自作し、樽型ロ-ラも既製品から削り出して作り直したそうだ。本来、メカナムのローラは車輪に対して45°の角度で設計されている。ところが同校では、その半分の22.5度の角度で設計した。これにより理論上の速度ベクトルが前方向に強まり、直線走行を速くなるようにできたとのこと。
おたすけアイテムは、異なる位置にあるフルーツを採るために、高さ方向を調整できる「ロジャーアーム機構」(ギアやピニオンなどで横方向にスライドさせながら展開する機構)も採用。ロボット本体にはWebカメラを搭載し、コントローラに付けたスマートフォンでフルーツを確認しながらターゲットを狙う形をとった。

このチームの素晴らしい点は、制御設計を電動系だけに頼らず、メカニックで挑戦しているところだ。機構設計が複雑になっても挑戦したいという姿勢は大変お手本になる。昔のように電子制御が発達していなかった時代は、ロボットでもカムやリンクなどの機構を使って知恵を絞りながらカラクリ的に動かしていた。1980年代に登場した小型カセットテープレコーダのオートリバース機構は、いまでは廃れてメーカーでも作れる企業がなくなってしまった(もちろんニーズの問題もあるが……)。しかし、こういった精密機械技術こそが実は日本にとって大切な気がしてならない。
おばけ機構だけじゃない! 妥協なき工夫を随所に凝らした鈴鹿高専

鈴鹿夜行の機体は、段差の乗り越えのために270mmの巨大なメカナムホイール(コロのみ市販品)をわざわざ自作している点が素晴らしかった。世の中に売っていなければ、自分で製作してしまえ! という高専生の実践力は凄い。
目玉となるおばけ機構を利用して、とにかくスムーズにロープを通り抜けていたのが印象的だった。ロボットの上下機構部を分離し、そのスキマからロープを通す基本的なコンセプトは他校と同様だが、両側に4個ずつ針金状の接触センサを付けて、ロープの位置を検知し、上下機構の連結部のロックを順次開放していくしくみだ。
フルーツの収穫については、まず1周目は本体に付けた熊手でキウイを引っ掛けてモギ採った。2周目のセンターゾーンのフルーツは、3Dプリンタで造形したハンドとCFRPパイプのおたすけアイテムを使った。

実は、さらに鈴鹿夜行の内部にはXY方向に動くステージもあり、コントローラ側でおたすけアイテムをマニュアルで細かく位置決めし、フルーツのS字フックを外せる工夫も凝らしていた。
デザインとストーリ—にこだわり続けた機体で、着実に得点を重ねた小山高専
小山高専は、ロボットのコンセプトを明確にしながら、見た目のデザインを重視しているチームだった。同校は毎年デザインが凝っており、今回は見習いケーキ職人ロボットの「ワンダフルケーキ君」が、たくさんのフルーツを食べてグラスケーキを完成させるというストーリーをデザインに反映させて、見事にデザイン賞を受賞した。

フルーツの収穫については、ケーキのイメージに合わせて、棒状のチョコ菓子を模した串を配置し、ロボットが前進するだけでキウイをモギ採れるシンプルな構成にしていた。これにより開口部の広い縦長グラスにフルーツを着実に落としていく作戦だ。おたすけアイテムのデザインも統一しており、センターゾーンではDCモータで上下にスライドさせ、フルーツを揺らして採れる機構を採用。ただ残念ながら本番ではセンターゾーンでのフルーツ収穫は見られなかった。




見た目からすると、車体が重そうな感じもするが、実は木製パーツと3Dプリンタで造形した部品を多用しており、重量を11㎏前後に抑えたそうだ。競技中は無線障害に悩まされた。しかし操縦者による熟練の手練で、ロボットの動作ラグを予測しながら操作していた点も特筆すべき点だ。もちろん高度なソフトウェアでロボットを制御することは技術的に素晴らしいことだが、競技中の予期せぬトラブルに臨機応変に対応するためには、まだ人間の技能のほうがロボットよりも一枚も二枚も上手ということなのだろう。
段差を飛び越す鶴岡高専かっとび君の秘密は、電ドルに使われるモータにあり!
低車高・低重心の機体で、まさに名前のごとく勢いよく飛び出していく鶴岡高専の「かっとび君」も、観客の目に焼き付いたロボットだろう。

かっとび君は、障害物をシンプルにクリアできる構造になっており、段差を乗り越えるというよりも、名前どおりに飛んでいくという表現のほうが適切な機体だろう。またロープも、低車高な機体のわきにある針金をガイドにしてすり抜けられる設計だ。

そのほか駆動系の工夫としては、エンコーダを分解能の低いものに変更したそうだ。といのもマイコンで速度を制御するときに、エンコーダから出力されるパルスが多すぎて処理できなかったからだ。速度を制御するには、駆動系のモータに付けたエンコーダによって、回転に応じたパルスを発生させる。たとえば分解能が360ppr(plus per revolution)のエンコーダならば一回転あたり360パルスとなり、1パルスは1度に相当する。
RoboMasterの駆動系を改造、CAN通信でサーボモータを集中制御した北九州高専
北九州高専のメンバーは、出場したロボットの中でも大きめなサイズで、存在感を放った「ベストハーヴェスト」で本大会に臨んだ。
ベストハーヴェストは、大口径のメカナムホイールを採用し、段差の乗り越え時に4隅の扇形プレートが角材と接触しながら回転する機構を取り入れた。これにより、あたかも大車輪のように機能させ、メカナムホイールの駆動と共に段差を乗り越えられるようにしていた。

フルーツの採り方は、おたすけアイテムのバー上部についた箱を上下に揺らしてS字フックを外す。展開機構はラック&ピニオン式で、固定されたモータを回転するとラック側がスライドし、フルーツの高さに自動で調整できるしくみだ。

お助けアイデムで採ったフルーツは、ロボット本体の広い開口部のカゴに落とされるが、カゴ内部に傾斜がついているため、扉を開けると簡単に取り出せるようになっていた。スタート地点に戻ってフルーツを回収する際に便利な工夫だ。

低重心のコンパクトな機体にダブル・パンタグラフで挑んだ阿南高専

果糖丸は、フルーツを採るときにパンタグラフで展開していくが、おたすけアイテムもパンタグラフ式なので、ダブルで高さを調整できるというアイデアがユニークだった。これらを併用することで、ミックスフルーツを採れる高さの最大2m70cmまでリーチできる。またロープを巻き上げて展開するパンタグラフを安定して立てるために、補助ベルトも付けていた。ただ本大会ではロープが機体に引っかかってしまい、センターゾーンでの活躍が見られなった点が残念だった。

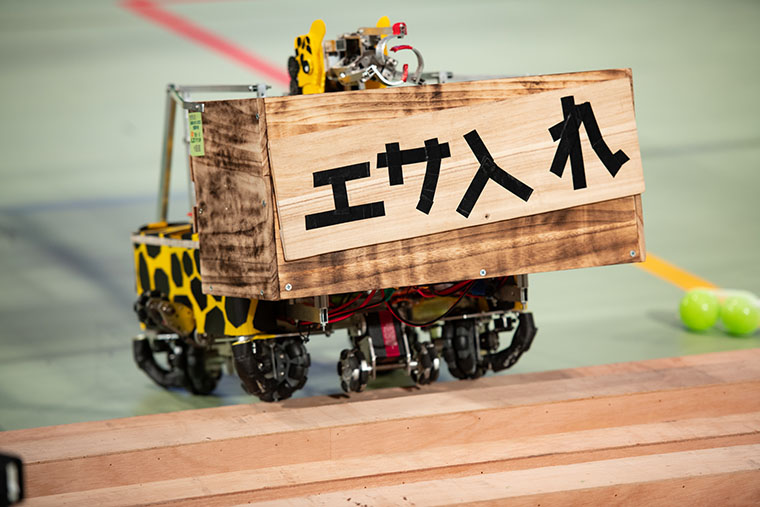
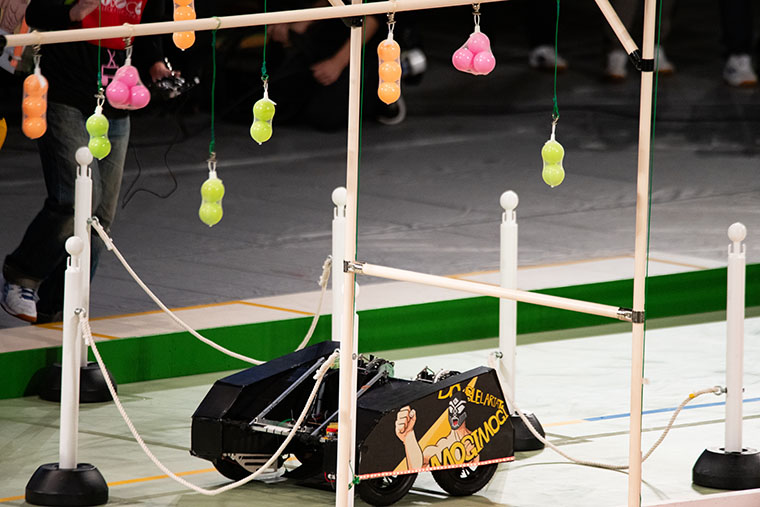
首を伸ばしてキリンがフルーツを収穫! 見た目が印象的な近大高専の可愛い機体

moggyは、幾重にも折り曲げた展開部をステンレスワイヤーで引っ張って、キリンのように伸長できることが大きな特長だ。おたすけアイテムのハンドは、ブドウ収穫用ロボットを研究している先輩からインスパイアされたという。
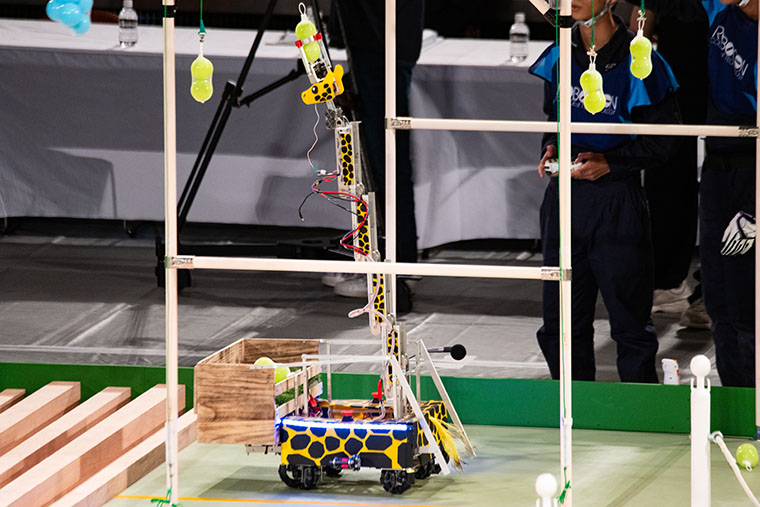
展開前は低重心・低車高の機体なので、ロープをそのまま潜り抜けられる。また段差越えは、機体の前と両側から補助輪が出て、車体を押し上げながら乗り越えていく方法を採用した。

同校は主要メンバーとなる6人で活動してきた。チームメンバーが少ないため、可能な限り設計をシンプルにして、人手をかけずにロボットを開発できるように工夫したそうだ。
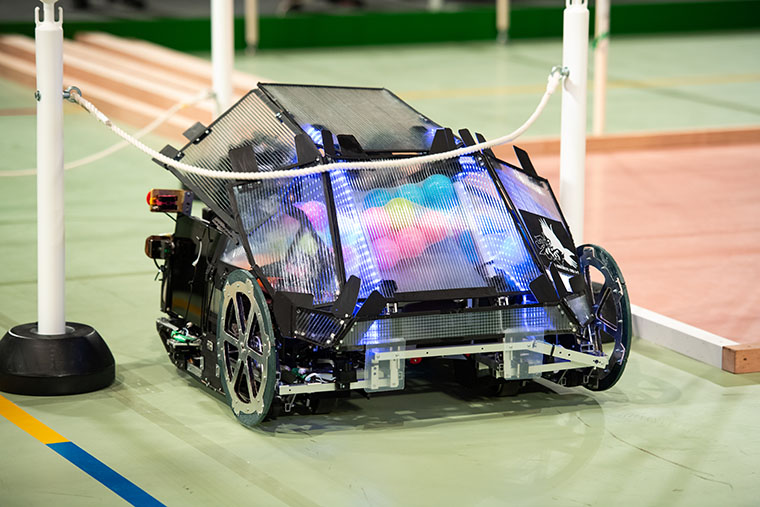
独特な世界観とデザインに魅せられる苫小牧高専の不思議なロボット

キャサリンのデザインは、1970年代の芝居小屋、チベットの曼陀羅絵巻、あるいは秘密結社のような不思議なイメージを彷彿とさせて印象的だった。

もちろんデザインだけでなく、走行性も優れている。脚まわりには4輪メカナムホイールと、中央に配置した2輪リムレスホイールがあり、勢いよく段差を乗り越えていく。

またロープすり抜け時には、前後のメカナムホイールの脚をエアシリンダで中央に寄せて高さのクリアランスをつくり、リムレスホイールですり抜けていくという方法を取った。このトラスフォームは都技高専などでも見られた手法で、さらにリムレスホイールによるロープのすり抜けは鳥羽商船、広島商船、徳山工業と同様のアプローチだ。
フルーツの収穫は、1周目は機体上部に付いたトゲ状パーツでキウイを採っていく。2周目のおたすけアイテムは、角材とアルミ板で剛性を保ちながら軽量化し、フルーツを把持する下側にネットを張って回収機構と兼用。また2個ぶんのミックスフルーツを同時にカゴに回収できる機構とした。

苫小牧高専は26年ぶりの北海道地区大会優勝で全国大会に進んだこともあり、記録に残るだけでなく、記憶にも残るロボットを目指したそうだ。まさにキャサリンは見たものの目に強烈に焼き付いた。
最多の4つのおたすけアイテムでセンターフルーツを狙おうとした旭川高専

同校の「クグラン」もいろいろな工夫が凝らされていた。特に目を引いたのは、やはりおたすけアイテムだ。食虫植物の「ウツボカズラ」のようなフルーツ回収機構を取付け、その先端部を速度を可変できるクランクとエンコーダ付の昇降機構で上下に揺すりながらフルーツを落とすしくみだ。
おたすけアイテムの数が4本と多いため、できるだけ簡単にセットして時間を取らないように、アイテムの挿入部にはローラーキャッチャを使用していた。センターゾーンの真ん中に入って機体を上手く位置合わせすると、この4つのアイテムでフルーツを同時に回収できることになる。ただし本番では通信トラブルが発生し、この素晴らしいしくみを披露できなかった。フルーツ同時4つ採りの雄姿を見たいところだった。

クグランは駆動系に走破性の高いクローラ(タイミングベルト)を採用し、力強く段差を乗り越えられるが、併せてメカナムホールも活用していた。
またロープについては名前のクグランのとおり、合体分離できる上下機構のスキマにロープを通す方式だ。リミットスイッチでロープを検出し、連動するロック部のホイールを回転させて解除することで、内部にロープを上手く通していく。
上下機構の操作は2人の操縦者が別々に担当する形だ。こちらの機体は車高があるため、本体のバランスを崩しやすい。そこでIMU(ジャイロセンサ)を採用し、安定性を保つように制御したそうだ。今回の競技は個々のミッションの難易度は高くないものの、クリアすべき項目が多いため、それらを解決するための機能をバランスよく盛り込むことが大変だったという。
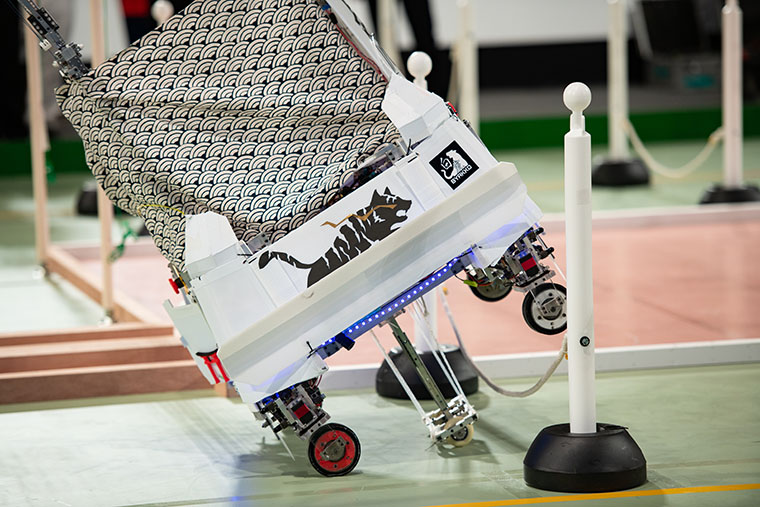
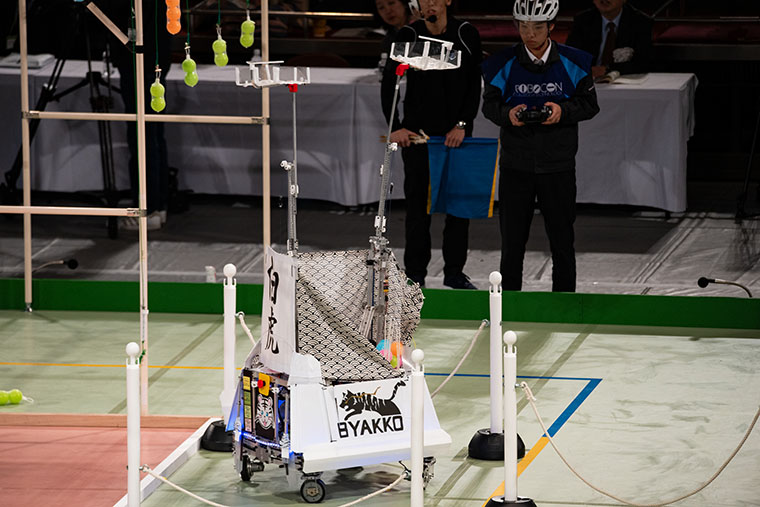
ロープをクリアするためのギミックが面白かった福島高専の白虎

白虎の機体はメカニカル面でギミックが多くあって面白かった。たとえば段差は、そのまま全開パワーで乗り越えたが、ロープのクリアは1周目と2周目で異なるアプローチで挑んだ。
1周目は低車高の機体に針金ガイドを張って、ロープ下から高速で潜り抜けた。おたすけアイテムを取り付けた2周目は、そのまま下から潜り抜けられない。そこで中脚を使ってシーソーのように機体を傾けながら、車輪付きの前脚を下ろし、次に後ろ脚でロープを跨いでいく方式とした。中脚を使ってロープを乗り越えるスタイルは高知高専などでも採用していたが、シーソー形式というのはユニークだった。

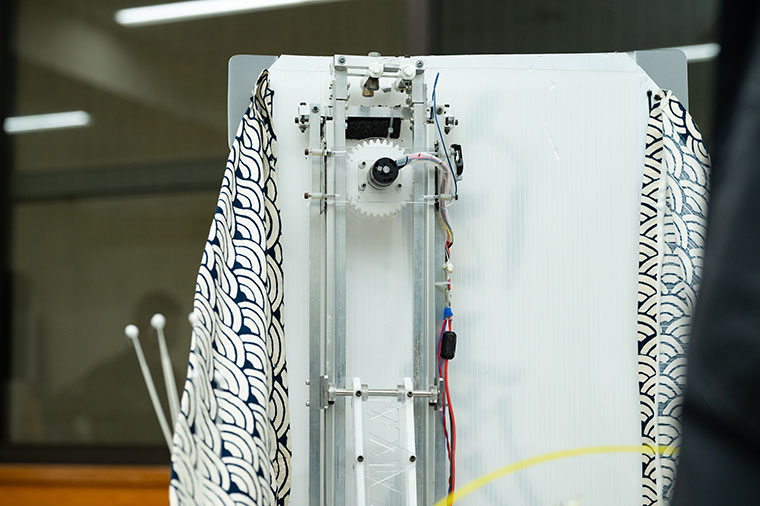
おたすけアイテムには2つのアームを採用。これで2個のフルーツを同時に狙える。機体に折りたたまれている展開機構をブラシレスモータで起こし、そのあとにラック&ピニオンのスライドが上がり、おたすけアイテムのヒモが同時に引っ張られることで、3段式アームが連動しながら伸びていくしくみだ。

また姿勢制御のためにジャイロセンサも使っている。たとえば左に機体が傾いたときは、左側の車輪の速度を少し上げ、真っ直ぐ走れるように応急対策を施したという。1周目の車高と2周目の展開時のサイズが約5倍にもなるため、走行時のバランスを配慮したそうだ。やはりデフォルトで車高がある機体の走行は転倒しやすくなるため、福島高専と同様にジャイロを採用する他チームもみられた。このあたりも高専生の技術へのこだわりが感じられるところだろう。
本番競技ではフィールド走行の操縦者以外に、収穫の専任者がフルーツを集中して採れるように手分けをしたという。このようなオペレーションの分担は他チームでも多く採用されていた。
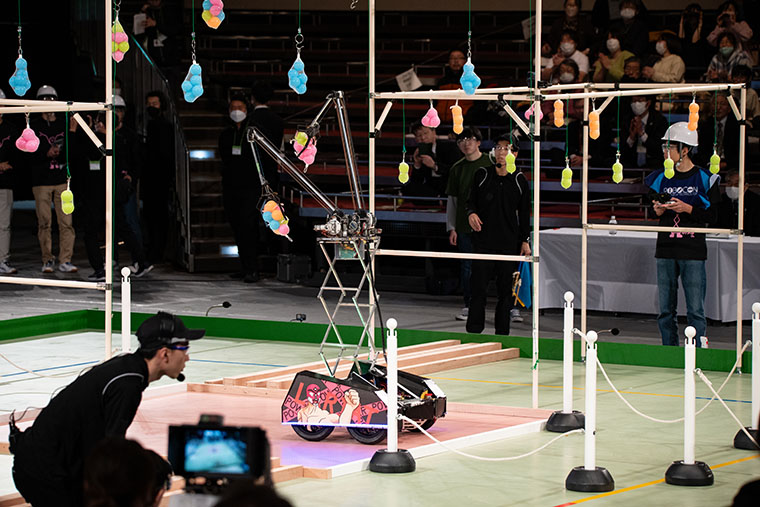
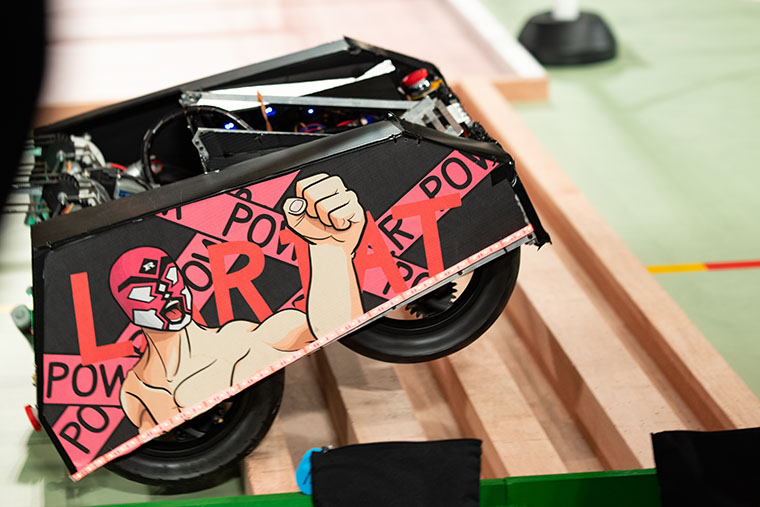
ハラハラドキドキ、観衆のココロをワシづかみにした長岡高専のダブルラリアット

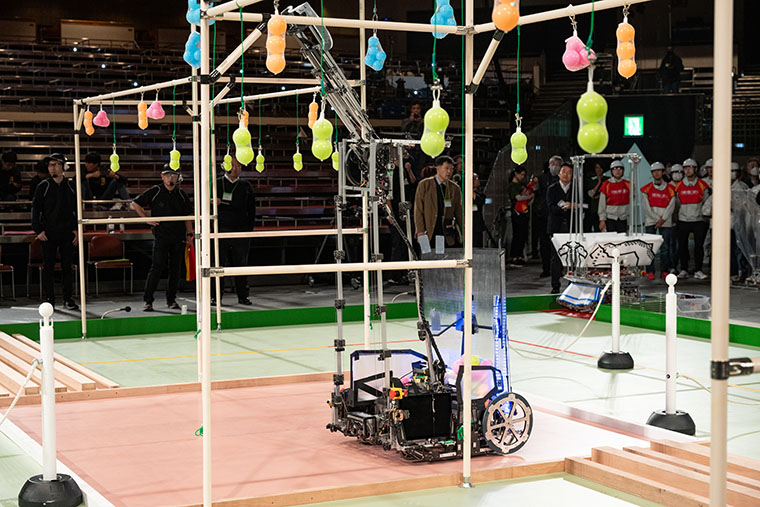
同校の「ダブルラリアット」は、低重心の車高と伸縮するパンタグラフを備えた独特の機体だが、やはり大きな特徴は長尺ダブルアームのおたすけアイテムにある。
ロボットの展開機構は、パンタグラフを採用しており、その上にある機構部にお助けアイテムのアームを装着する形とした。その動力源はパンタグラフ上の3つのモータに集約させ、ベルトと3枚のギアでアーム先端まで動力を伝達させるしくみだ。

おたすけのアーム自体は肩と肘が回転するため、広範囲にわたってフルーツを採れる。またアーム先端には3つの爪があり、フルーツをしっかりグリップできる構造だ。

ただしアーム自体が長尺なため、どうしてもフルーツを掴むとモーメントがかかる。そのためアームが揺れて、いまにも折れそうな印象を受けた。もちろんアームのハンド部は極力軽くなるように設計されているし、実際に折れるようなことはないのだが、この微妙な感じが逆に観客の心をワシ掴みしたようだ。筆者も試合中に思わず「頑張れ! ラリーアット」と心の中で叫んでしまった。
障害物に関しては、段差越えのために大きな車輪を採用。ロープのすり抜けは低重心設計とし、そのまま下から潜れるれるオーソドックスな形式だ。また本機は床に落ちたフルーツを回収できるようになっている点も面白いところだ。こういった機構は、沖縄高専や大阪公大など複数校でも見られた。
まさにハイテクの塊りだった! 勝利の女神を引き寄せた大阪公大の「鴉」
見事に優勝を果たした同校の「鴉」(からす)についても最後に見てみよう。

同校は、とにかく一周目を最速で走り切れるように機体をチューニングし、2周目のセンターゾーンにいち早く到達することで、優位なポジションからフルーツをモギ採る戦略に徹していた。
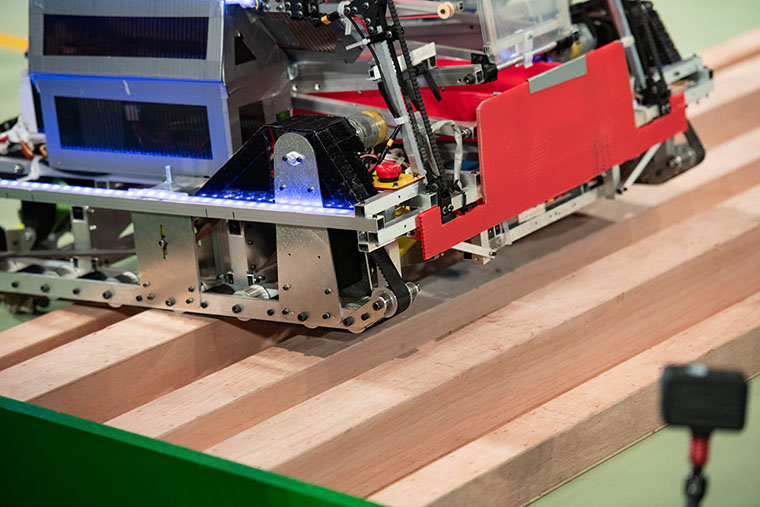
その戦略を実現するロボットの機構が、このコンパクトな機体に凝縮されていた。脚回りは全方向移動が可能な独立四輪ステアリング機構を採用し、大きな前輪で高速に走行できるようなっていた。ロープの潜り抜けは、低車高な機体にシールド(カバー)を付け、そのまま下から高速で潜り抜けた。
障害物の段差越えについては、段に合わせた大車輪のほか、補助用のクローラも付けて、万一のスタック時でも前後どちらからも脱出できる工夫を凝らしていた。スムーズな段差越えだけでなく、センターゾーンに入ったときも状況に合わせて前後に移動したり、ゾーンから素早く抜けることが可能だ。こういった機能があるからこそ、同校は制限時間のギリギリ20秒ぐらい前までフルーツ狩りに専念ができたわけだ。
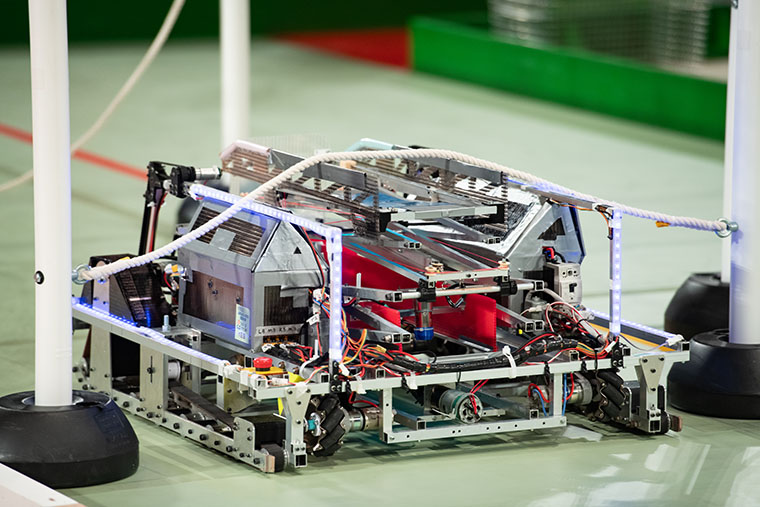
鴉は低車高だが、おたすけアイテムだけでも約1600mmの高さになる。それに加えて幾重にもキレイに畳まれた展開機構の高さが加わる。
この展開機能の上には大きなギアドモータがあり、ここにおたすけアイテムを装着し、ギアで角度を変えることで、長尺なお助けアイテムがブレたり、たわんだりしないように対策を施した。この機構もフルーツを採るときにモーメントがかかるため、アプローチを微調整する役割があるわけだ。またセンターゾーンで斜めからフルーツにアクセスすることで、合法的に相手のゾーン侵入を阻めたという副次的な効果も出たようだ。

機体の制御にはROS2(Robot Operating System2)を利用している。他チームでもROSを利用しているチームもあったが、鴉ではRiDARも搭載することで、前方のロープやスタートゾーンに入るときや、アウトコース/インコースモードなどの周回操縦の一部を自動化していたそうだ。これにより一周目を最高2.6m/sという速さで回れるようにしたという。ただし、あまり自動化しすぎないこともポイントになるという。対戦競技では相手が急に目前に入って激突するリスクもあるため、操縦者が操作に関与できる余地を残した半自動化ぐらいが丁度良いとのことだった。
またコントローラも自作しており、機体のステアリング角度などのデータをROSからスマートフォンに送ってチェックできるようにしていたそうだ。通信環境が異なる場所で動かす場合にも、パラメータ変更などが当日直前に容易に行えるメリットもある。
こういった微に入り細に入りの事前対策をお聞きすると、同校が優勝した理由がよくわかった。これだけコンパクトな機体に高度な機能を緻密に詰め込んだ努力が、勝利の女神を引き寄せたのだろう。
まだまだ、ご紹介できなかったチームも多くあるのだが、いずれも負けず劣らず素晴らしい機体ばかりだった。先端のAI技術を取り入れたり、古くて枯れた技術を駆使して安定稼働させたりと、競技へのアプローチはさまざまだ。しかし勝負の裏側では、いかに高専生が真摯にロボットの開発に向かい、切磋琢磨しあいながら、日々の技術を向上させてきたのか、そのいったんが理解できたような気がした。勝ち負けも大切だが、そういった努力こそが価値のある宝物なのだと実感した。ロボコンに参加されたすべての高専生にエールを送りたい。
井上猛雄
産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、株式会社アスキー入社。「週刊アスキー」副編集長などを経て、2002年にフリーランスライターとして独立。おもにエンタープライズIT、ネットワーク、セキュリティ、ロボティクス、組込み分野などを中心に、Webや雑誌で記事を執筆。主な著書は、「災害とロボット」(オーム社)、「キカイはどこまで人の代わりができるか?」(SBクリエイティブ)など。





関連記事
-
 ものづくり
ものづくりあの「ガシャッ」をもう一度! ファミコンのカセット交換みたいなセンサーガジェットを作った
2026年07月21日 -
 ものづくり
ものづくりAIの時代に、手を動かす意味——ICOMA生駒崇光のプロトタイピング哲学
2026年07月10日 -
 ものづくり
ものづくり先輩からつながった“強豪校”への思いが大会史上“最高”のゲートに結実!(熊本高専熊本キャンパス)
2026年06月26日 -
 ものづくり
ものづくり3種の接着剤を使いこなせ!セメダイン使い分け工作選手権
2026年06月19日 -
 ものづくり
ものづくり出来上がった瞬間に“無”に帰しようとする時間をものづくりで表現する−−−−造形家・竹谷隆之が語る造形への思い
2026年05月29日 -
 ものづくり
ものづくり【高専ロボコン2025全国大会レポート(後編)】~ロボコン大賞ほか、個性がキラリと光る各賞受賞のロボットを大紹介!
2026年05月15日 -
 ものづくり
ものづくり小学生のロボコンが抜群に面白いのはなぜか!?その答えがここにある「小学生ロボコンを振り返る会 2025」
2026年04月24日 -
 ものづくり
ものづくり30年分のロボットを保管する小山高専「なんなら全部動きます」
2026年04月17日 -
 ものづくり
ものづくり稼げる工房の作り方——「ここにしかない」をつくる独創的な方程式とは
2026年04月10日 -
 ものづくり
ものづくり電子工作×推し!光るフロートで推し接着剤をパレードさせる
2026年04月03日
タグ一覧