前編のレポートでは、高専ロボコン2025全国大会の概要と、準々決勝からの各チームの戦いについてご紹介しました。最終的な頂上決戦は、まったく戦略が異なる旭川高専と熊本高専(熊本キャンパス)の見事な戦いで幕を閉じました。この後編では、今回優勝した旭川高専や、準優勝&ロボコン大賞を取った熊本高専(熊本キャンパス)のほか、各賞を受賞したユニークなロボットについて触れましょう。
記録よりも記憶に残るエキシビション参加のユニークな2チーム
全国大会の進出ならずとも、独創的なロボットの魅力を「見せてくれた」(魅せてくれた)エキシビションのロボットからご紹介したいと思います。毎年、観客に記憶に残る感動を与えてくれるエキシビションに登場したチームは、産技高専(荒川キャンパス)と小山高専の2チームでした。
【エキシビション】その1
産技高専(荒川キャンパス)「あらごんくえすと」
 【★写真1】
【★写真1】
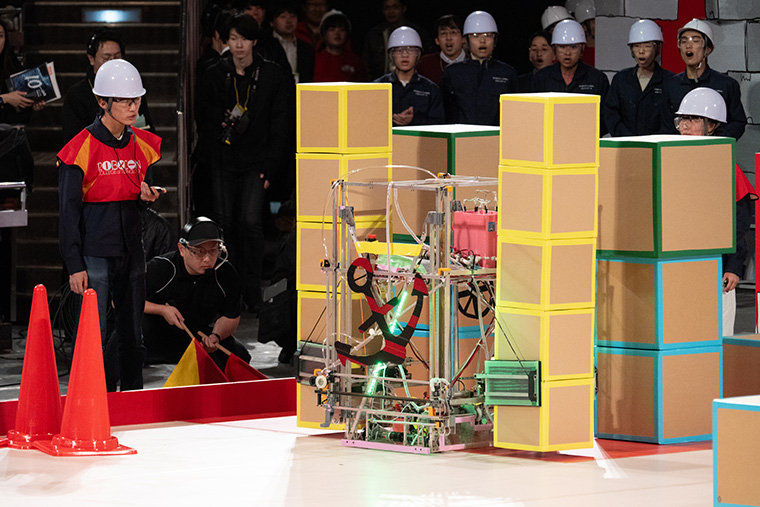
あらごんくえすとの「あらごん」は、産技荒川チームの後輩が想像で描いた異世界のイラストをモチーフにしたもの。異世界に捉われた高専生を救うために、あらごんがゲートをつくって高専生を救出するというストーリー設定でした。あらごんは、共有ボックスエリアの長尺ボックスをピックアップしてゲートをつくりますが、その大きな特徴はアームのハンド先端の吸着盤でボックスを取るときに、センサーを使ってロボットの展開と収納の一部の動作をシーケンス的に自動化していることでした。
また搭載アームは平行リンク機構を採用しており、水平を保ちながらボックスをピックアップできる点も特徴になっています。アーム先端部には回転機構があり、ボックスを縦積みにしたり、手首部を水平と上下にひねってゲートの天面になる長尺ボックスを載せたりすることが可能。この機構はあまり見られない機構でした【★写真2】。

【★写真2】
アーム部には、水平姿勢を保てる平行リンク機構を採用していた。
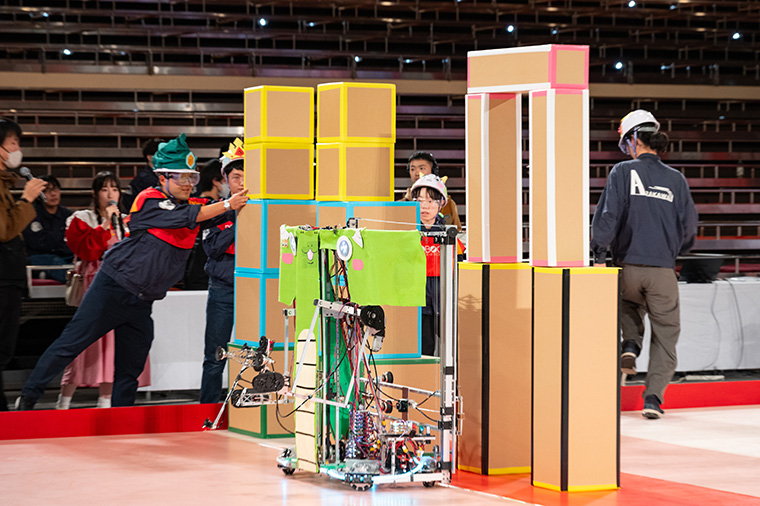
同校のロボットは、長尺のボックスを真横から吸引して搬送します。このときボックスの自重を受けて大きなモーメントが生じるため、強力な吸着力が必要になります。次に柱を縦積みにしてゲートの梁にあたるボックスを置き、それらを頑強なリフト構造で持ち上げて、さらに高いハイゲートを完成させることができます【写真3】。
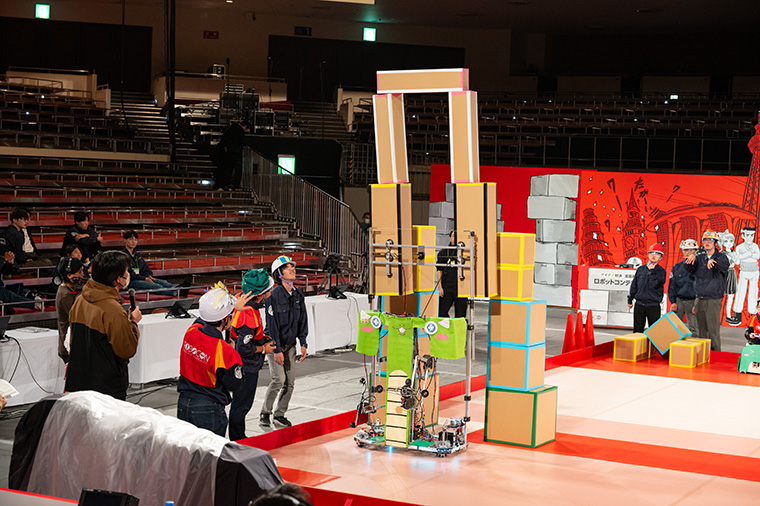
【★写真3】
長尺ボックスを縦に2本積みにしたハイゲートの構築にチャレンジ。
実はあらごんを動かすときは、3人のオペレーターが独自の操縦用コントローラを持っており、最も見やすい位置にいる担当者に操縦権を切り替えることができます。このように各人が協力してロボットを動かせる工夫は、操作性の観点で合理的と言えるでしょう【★写真4】。
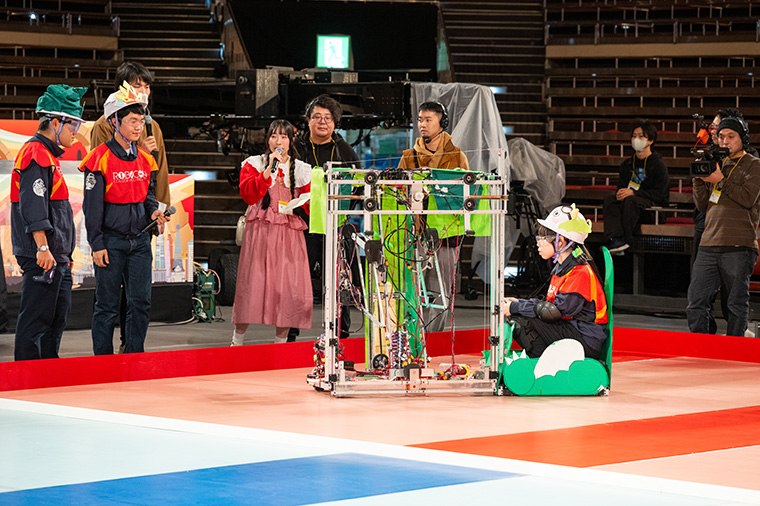
【★写真4】
ゲートをくぐり抜けるときは、台車の搭乗者に操縦権を与えることも可能。
【エキシビション】その2
小山高専「レッサー☆はぐ太郎」
 【★写真5】
【★写真5】
腕白なレッサーパンダの男の子をモチーフに、誰もが笑顔になる楽しいロボットを製作したのが小山高専チームです。はぐ太郎は、チームメンバーの一人という設定で、楽しさを演出するためにレッサーパンダの縫いぐるみを本体に設置したり、テーマ曲まで創作したりと、アナログ面でも工夫していました。ちなみにはぐ太郎という名称は、ロボット本体と台車が合体するとき、台車の搭乗者を後ろからハグできることに由来しているそうです【★写真6】。

【★写真6】
本体と連結すると、はぐ太郎が後ろから台車の搭乗者をハグしている形になる。
ロボット本体には2本のアームがあり、長いボックスを同時に2個ぶん吸い上げることが可能【★写真7】。また事前に作り置きした二本柱の間に入り込んで、一番下の土台のボックスを挟んで平行リンク機構で持ち上げながら搬送できます。柱の搬送後は、ゲートの梁となる長尺のボックスを2つのアームで吸引し、ゲートを完成させます【★写真8】。はぐ太郎と合体した台車の搭乗者は、かなり狭いゲートを上手にくぐり抜けましたが、ここでも操縦者のテクニックが光っていました。
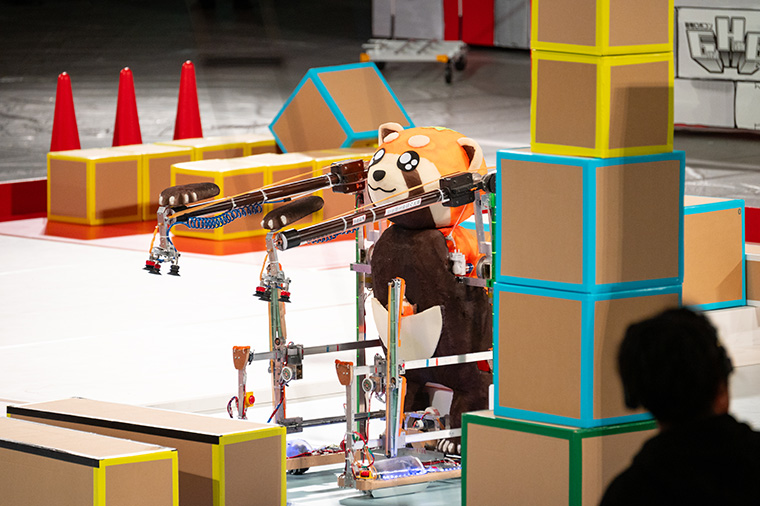
【★写真7】
2本のアームの先に付いた吸引機構で長尺のボックスを同時にピックアップ。

【★写真8】
アームを紐で引いて展開し、最上部のボックスを2本柱の上まで持ち上げる。
優勝、ロボコン大賞ほか、デザイン賞、アイデア賞、技術賞など、各受賞作品を一挙に解説
ここからは、各賞を受賞したチームのロボットについて紹介します。
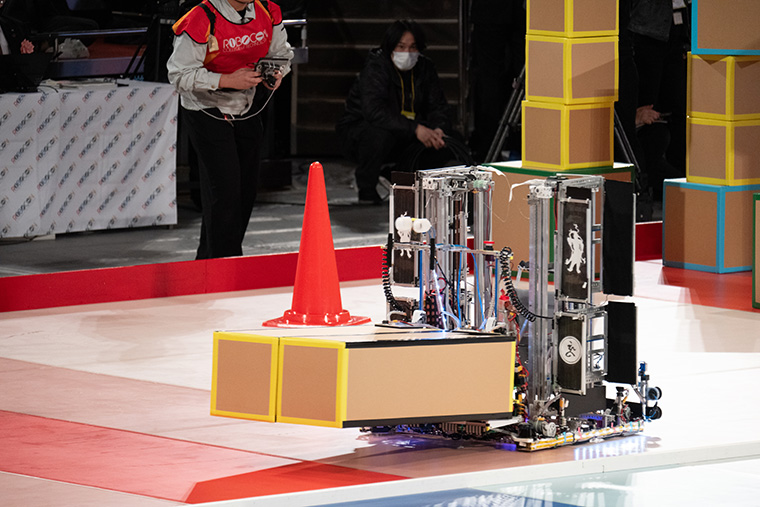
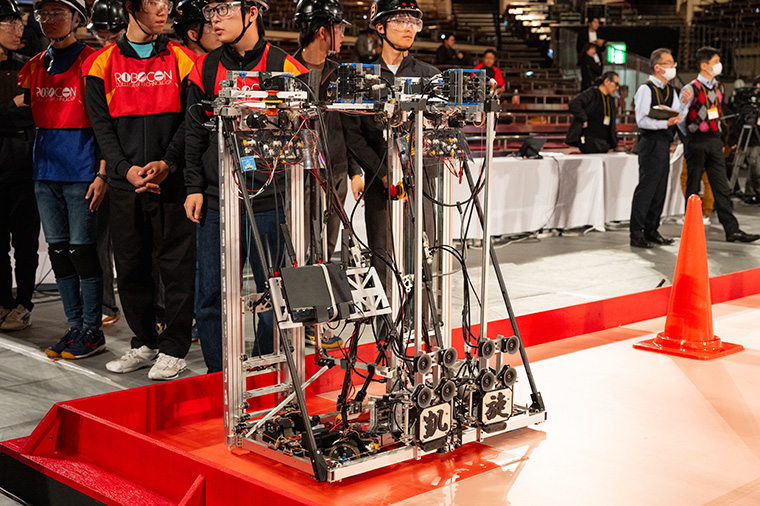
【優勝】旭川高専 「天旋」
 【★写真9】
【★写真9】
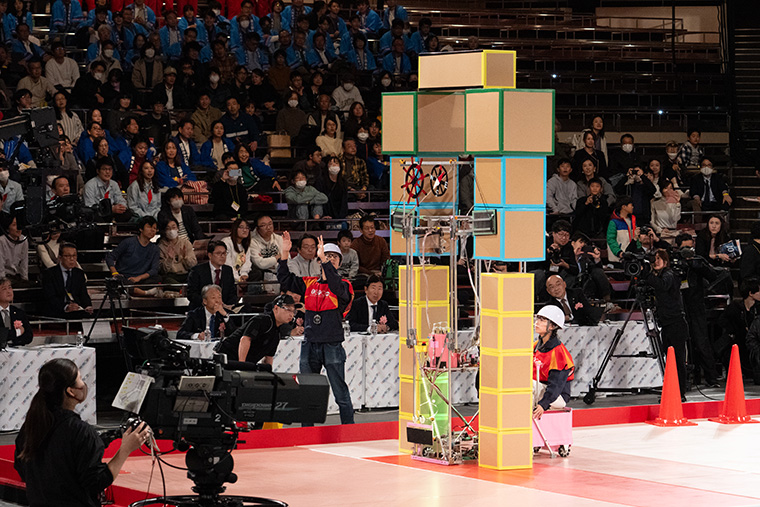
本大会で見事に優勝を果たした旭川高専のロボットは、前編でも触れたとおり戦略自体が他校と異なるため、ロボット自体にも見えない部分で独自の工夫が凝らされていました。同校の戦略は、高いゲートを構築して得点を得るのではなく、210cmという低いゲートを素早く設置してから、残りの2分間で周回点数を稼ぐというもの。ゲートづくりでは、共有ボックスエリアからボックスを一切取らないため、相手と小競り合いになることもありません。
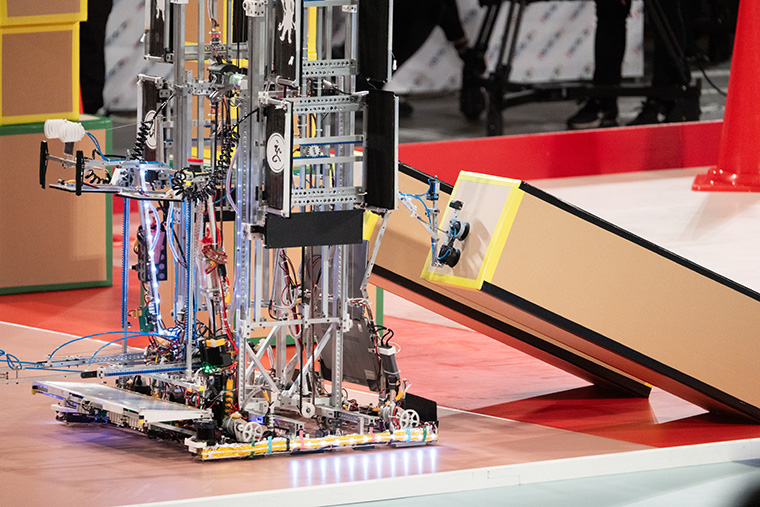
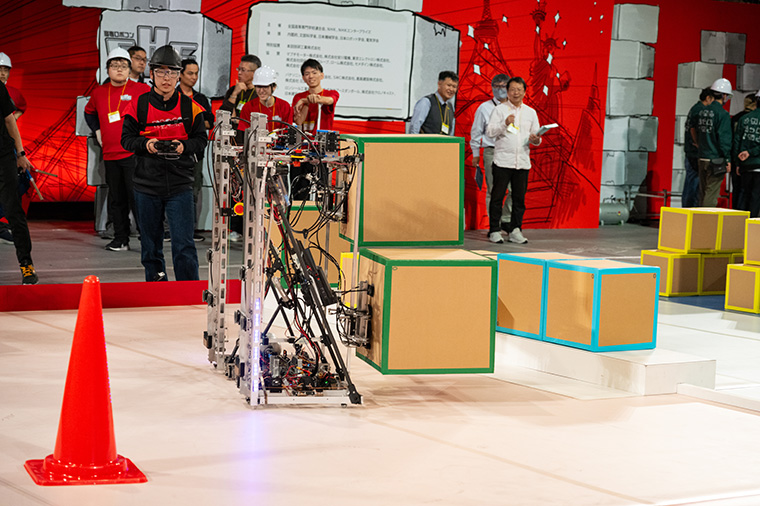
ロボットは、専有ボックスエリアでセッティングしたゲートをそのまま移動できる運搬機構を備えている点が大きな特徴です【★写真10】。このゲート運搬機構には、ゲート下に板を差し込むアームと、複数の吸着盤でゲートの梁の部分を保持する多段展開式アームがあります【★写真11】。ゲートを持ち上げずに、引きずるように運搬することで、安定したゲートの運搬を実現するアイデアがユニークでした。
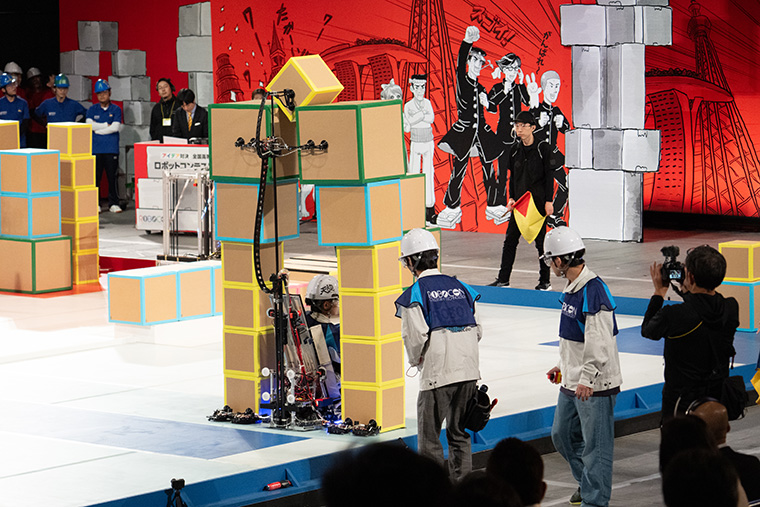
【★写真10】
ゲートの構築と搬送。多段展開式アームを展開してゲート上部にあたる3つのボックスを吸着盤で保持。
 【★写真11】
【★写真11】
ゲートの台座になるボックスに薄い板を差し込んでから、床を擦るように搬送するユニークな発想。
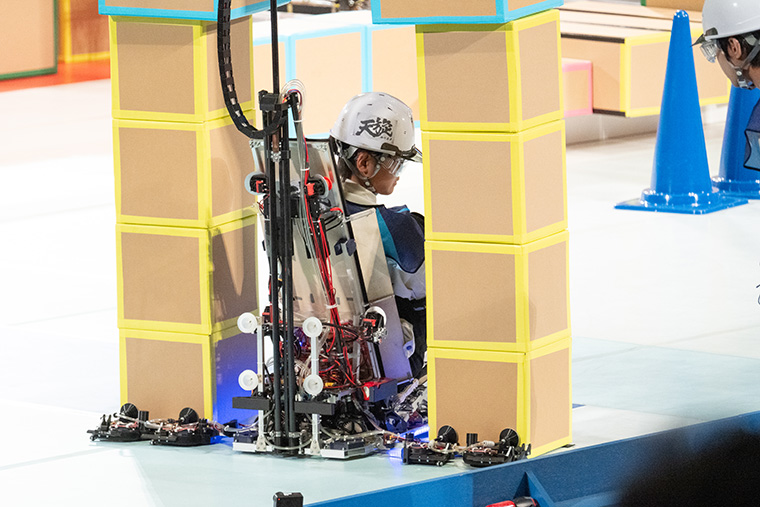
ゲート自体は、他校のようにゲート頂上に置く長尺ボックスがなく、立方体のボックスを挟むだけ。そのため必然的にゲート幅も大変狭くなります。この狭い隙間を高速かつ正確に安定して回る工夫として、台車の軌道をいかに正確に描くかということが最大の技術ポイントになります。50回以上も周回すると、どうしても微妙に旋回のズレが生じますが、オペレーターが周回ごとに目視で職人技のように微調整していたそうです。また台車の搭乗者も、ロボット本体と合体する際に座面を斜めになるようにして全体の重心を低くし、さらに回転時に柱のほうに少し体の重心を傾けていました。ちなみに搭乗者は5kgも体重を減量し、ロボット全体の軽量化にも貢献したそうです【★写真12】。

【★写真12】
台車の搭乗者は減量して試合に臨んだ。高速回転の遠心力で振り回されずに回れるように意識していたとのこと。
ロボットの足回りに関しては、ゲートを移動させるための駆動用の高速車輪と、周回用にグリップの強い専用補助輪を4ヵ所に装備。ゲート接地後に、通常走行用の自在補助輪から、高速周回専用の補助輪に切り替えます。この補助輪は、事前に回転方向を固定して取り付けているため、軌道も一定の円を描けるのです。それでも何回も回っていると計算通りにいかず、軌道が徐々にずれてくるため、前述のようにオペレーターの微調整が必要になるとのこと。
このように旭川高専のロボットは、試合では単純に周回しているように見えても、実はカスタマイズされた機構を備え、目に見えない部分で優勝に向けた綿密な計画が練られていたのです。今回の優勝は偶然ではなく、その努力が結実したものだと感じました。何度でも安定して高い周回得点を獲れたことも納得がいきました。
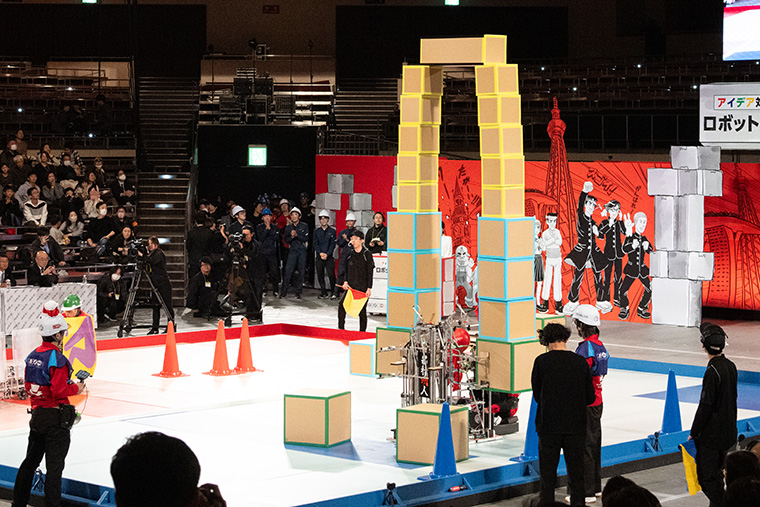
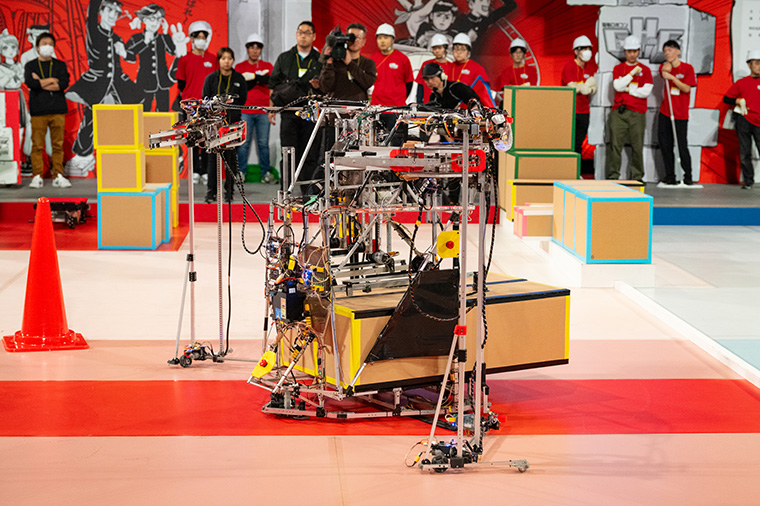
【準優勝】&【ロボコン大賞】熊本高専「強奪名星」(ロブスター)
 【★写真13】
【★写真13】
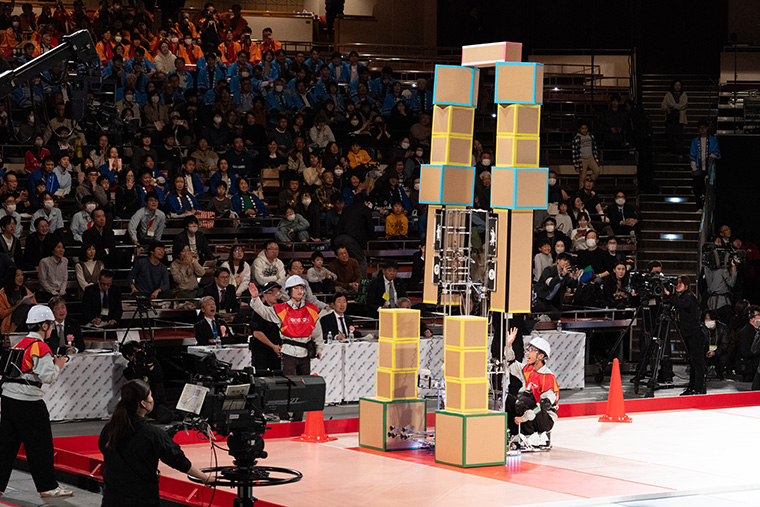
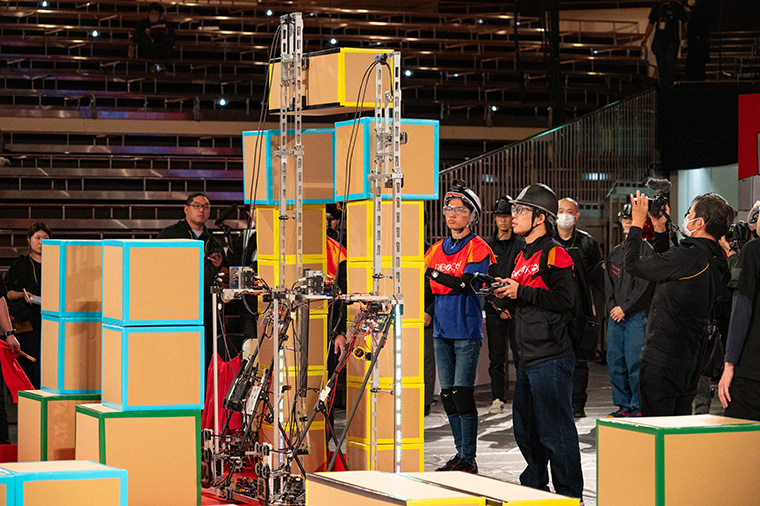
熊本高専(熊本)は、まさに正攻法でグレートハイゲートに挑戦したチームでした。同校は一度は途中敗退しましたが、ワイルドカードで不死鳥のように復活し、ついに決勝戦で大会最高となる420cmのゲートを完成させました。得点は旭川高専に僅差で及ばなかったものの、その素晴らしい成果は、ロボコン大賞の受賞へ繋がりました。
同校のロボットは、状況に応じて臨機応変に多様なゲートをつくれることが強みです。本体のサイド部に搭載された2対(赤と青)のアームは変幻自在に動き回ります。最大1300mmまで横に開くため、グレートハイゲートの柱に必要となる長尺の共有ボックス(Eボックス)を2本ぶん同時に挟み込んで搬送できます【★写真14】。
【★写真14】
1本のアームだけでなく、2本のアームで立方体を織り交ぜた効率的な取り方も可能。
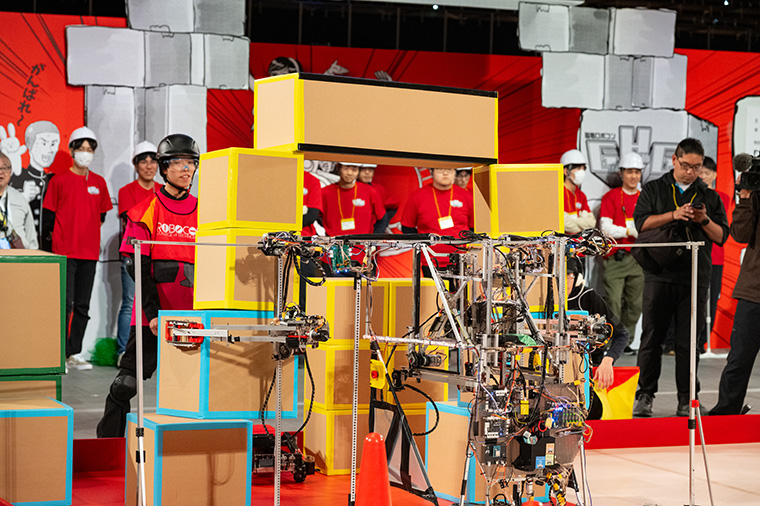
ゲートを構築する過程では、アームの吸着盤で吸い付けたEボックスを90度回転させて立てられるアイデアが秀逸でした。ボックスの端を把持して、上手に回転させるテクニックは熊本高専八代キャンパスなどでも使われていました。さらにアームはボックスを約2mまでリフトアップでき、ゲートの合体や頂上のボックス配置に対応します。 事前にセッティングしたミニゲートとEボックスの柱を合体させ、安定した土台部へ積み上げることでグレートハイゲートが完成します【★写真15】。

【★写真15】
すべてのパーツを積み上げ、最高420㎝もの高さを誇るゲートが完成する瞬間は感動的。
ちなみに事前に作り置きしたゲートの幅は1mですが、頂上に設置されるボックスの幅は80㎝なので、そのギャップを解消するために、立方体の柱を少しずつずらして台形状の柱にして下幅を1mまで広げていました。このゲートを台車と共にすり抜けるときは、本体アームを収納することで、特に問題なく対応できるように設計されていました【★写真16】。

【★写真16】
完成したゲートを無事通過。台車は四輪オムニホイールを採用し、全方向移動が可能。
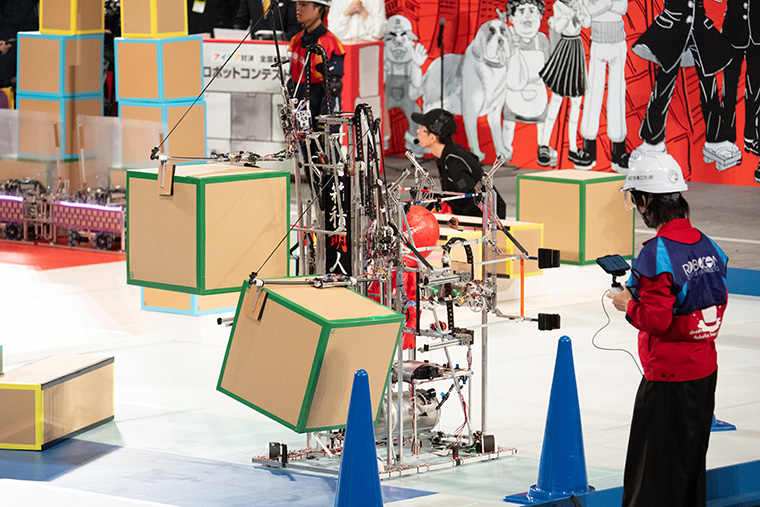
【アイデア賞】明石高専「箱積明人」(スタックメイト)
 【★写真17】
【★写真17】
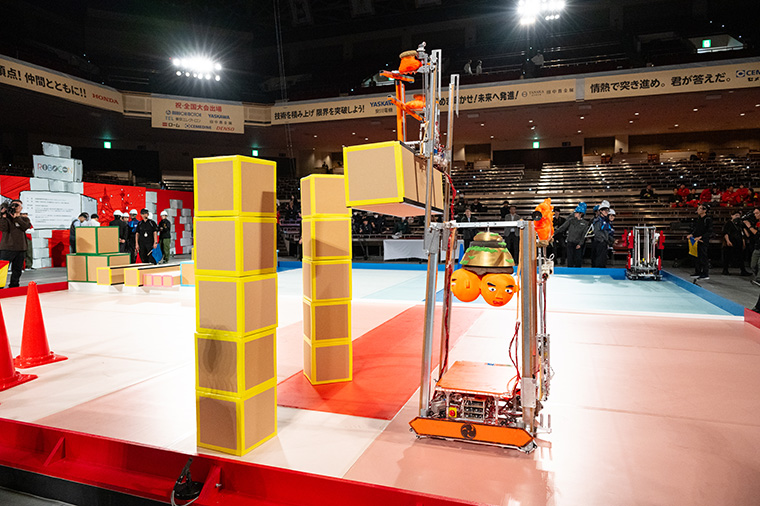
明石高専は、明石焼きを彷彿とさせる赤いタコのフィギュアをロボットに取り付けて参戦しました。その本体は、最高370㎝のハイゲートを構築できる能力があります。この高さのゲートを積み上げるには、長尺の共有ボックスを相手よりも早く取る必要があります。そこで本体の足周りを高速化し、最適な自動制御でコントロールする工夫を凝らしていました。足周り用の高トルクモータと、スべリが少ないグリップ力のオムニホイールを自作し、最大3m/s(10.8km/h)の高速で共有ボックスゾーンに到達できます。さらに制御系の一部を自動化し、最適パターンでミスのない運用もできます。
気になるロボットの機構ですが、フロントとサイドに各2つのアームとハンドがあります。まず正面アームで共有ボックスを横から同時にはさんで、効率よくピックアップすることができます。ハンド部は本体に搭載されたエアシリンダの圧力でボックスを把持します【★写真18】。
【★写真18】
本試合では、共有ゾーンを二往復して、正面アームで必要なボックスをゲット。
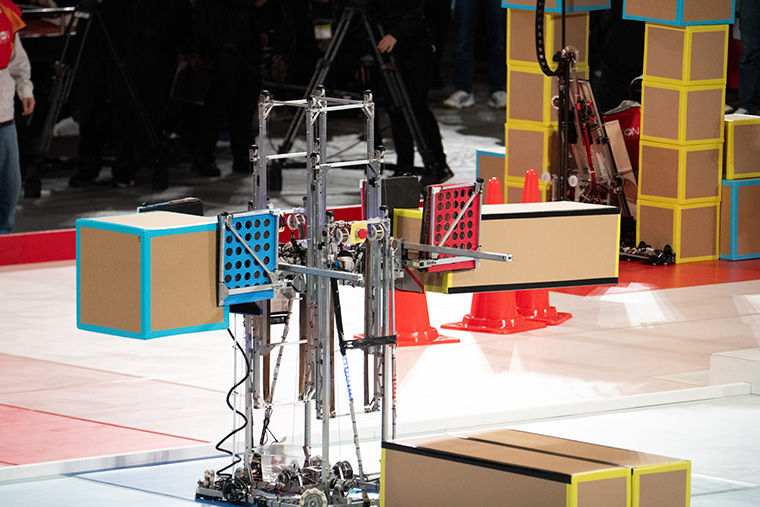
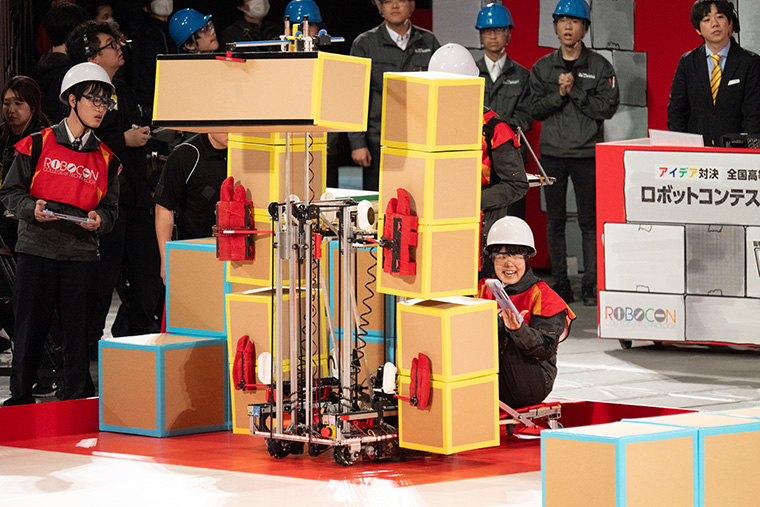
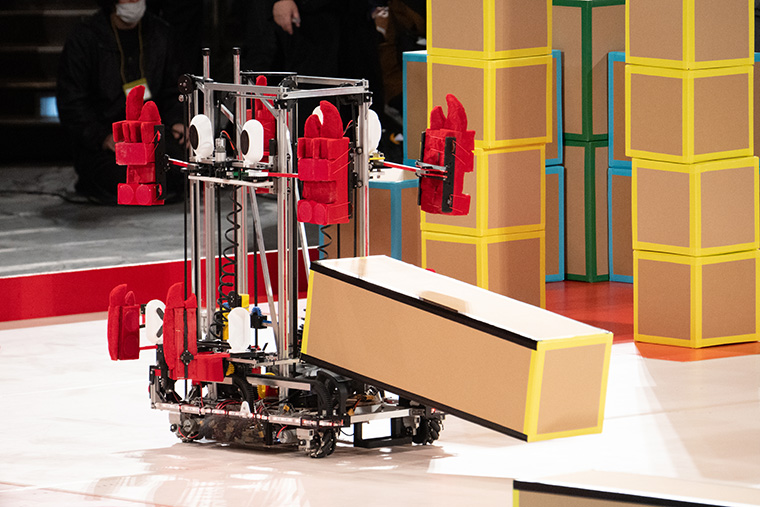
回収したボックスは、頑強なロジャーアーム機構の昇降部に渡され、ボックスを高い最上部に設置できます。この昇降機構には、戻りのないラック&ピニオンギアと高トルクモータを採用していました。このように、本体の把持機能と昇降機能により、いったん4本の柱をボックスでつくり、それらを積んで高さ320㎝のゲートを組み立てます【★写真19】。そのゲートにロボットが入り込んで、本体の両側にある2対のサイドアームでゲートを挟み込みながら、そのままの状態で搬送し、最後に50cm立方体の台座に積むというスリル満点の技を披露しました【★写真20】

【★写真19】CAP
昇降には120cmまで伸縮するロジャーアームを展開し、14㎏までのボックスをリフト。
【★写真20】CAP
320㎝のゲートを両脇のアームで支えながら搬送する様子は冷汗もの。
また台車のほうにも工夫がありました。車輪は本体と同様にオムニホイールを採用し、前後左右に自由に動くため、ロボット本体の操作に影響を与えません。本体との連結もスムーズで、連結するときに凹凸部ではまり、移動時の台車のブレもなく、ゲートの通過も安定します。さらに座面のクッションや足回りのカバーを取り付けたり、何かあったときに搭乗者が停止できるブレーキ機能を備えたりして、安全面にも配慮しました。このように明石高専のロボットはアイデア賞にふさわしい機能が満載の機体でした。
【技術賞】奈良高専「金剛」
 【★写真21】CAPなし
【★写真21】CAPなし
全国大会で常に上位に食い込む奈良高専は、技術面に優れた強豪校です。同校のロボットは、自己位置推定、経路生成と経路追従、ROS 2(The Robot Operating System 2)、マシン内ネットワーク、真空ポンプ、吸着検出など、高度な技術を組み込み、380㎝ものゲートを完成できる安定感が大きな特徴です。今回の戦いでは、惜しくも準々決勝で敗れたものの、優勝の射程圏内に確実に入っており、高度な技術が評価されて技術賞を獲得しました。
このロボットは、自動制御と手動制御の組み合わせにより、柔軟かつ高速に動きます。オートマチックな自動制御モードでは、本体に組み込まれたセンサ類(ジャイロセンサ、エンコーダ、レーザーレンジファインダ)により障害物などを検知し、自己位置や最適経路を判断して、グレートハイゲートに必要な最上部や増築用の共有ボックスをいち早く回収できます【★写真22】。
【★写真22】
共有ボックスから、最も重要な長尺ボックスを2本まとめてピックアップ。
機構的には、ボックスを取るための吸着アームと、表面積が広い4組の挟み込み式ハンドを搭載しており、ボックスを作業エリアまで効率的に運搬できます。試合開始直後に、まずパイロンを確実に押しのけ、その後に共有ボックスエリア間を高速で二往復してボックスを集めます。一往復目では上部用の共有ボックスを専有ボックスエリアに運び、次に事前セットしていたゲートの4本柱を2本ずつ移動します。二往復目に柱を運搬する際は、台車も本体に自動連結させ、移動時間の短縮化を図ります。
ボックスを把持するアームは、移動しながら同時に展開することで、時間を一秒たりとも無駄にせず、効率的なアクションを実現。また長尺ボックスをゲートの柱として立てるときは、ボックス側面を吸着して引き上げるアプローチを取っていました【★写真23】。
【★写真23】
熊本高専のように長尺ボックスの端を押さえるのでなく、側面を吸着して引き上げていた。
ゲート合体時は、ロボット本体が中央の隙間に入り込む形となり、左右4組のハンドでゲート用の柱を把持しながらリフトアップします。このとき本体に組み込まれた昇降機構は、上下動の範囲を自由に調整できます。最上部用の長尺ボックスは、吸着盤で吸い付けて載せますが、ソレノイドのロック解除で、ボックスの向きを切り替えられます。最後に土台にゲートを載せると、最高380㎝のグレートハイゲートが完成します【★写真24】。
【★写真24】
グレートハイゲートの完成までには3段階のゲートの積み上げが必要になる。
ゲートの通過は、事前に本体と連結された台車でトライします。ちなみに本体と台車の連結部にはラッチ機構を用いており、電磁ソレノイドでラッチの着脱が可能です。また台車については、足回りにオムニホイールを採用し、全方向にスムーズに移動できるように摩擦も抑えていました。
【デザイン賞】国際高専「香箱倶楽部」
 【★写真25】
【★写真25】
金沢港で水揚げされた新鮮な香箱ガニをモチーフにした機体が評価され、デザイン賞を受賞したのは国際高専でした。近江町市場から逃げ出したカニを、台車に搭乗した市場関係者が追いかけるというストーリー性も面白く、カニの目がくるくると回って愛嬌があるロボットに仕上がりました。同校はメンバーが4名しかおらず、そのハンデを補うために全員が一丸となり、力をあわせて全国大会に勝ち進んできました。戦略は旭川高専と同様で、専有ゾーンで作り置きしたゲートを素早く運んで周回することに専念し、箱積みの機能は省くことにしたそうです【★写真26】。

【★写真26】
周回能力は10周前後で、ハイゲートのポイント50点ぶんを補う戦略。
メンバーが少ないので、ロボットのメカもシンプルでした。カニの甲羅の部分はボンネットの役割を果たし、試合時にボックスが落ちても壊れない設計です。また重心を低くするように機構を配置。対になったカニの2本ハサミ(計4本)は、リンクとボールねじで両方が連動しながら開閉してボックスを把持します。220㎝のゲート搬送は、ねじとタイミングベルトを使った昇降機で床ぎりぎりにリフティングし、高さを低く抑えていました【★写真27】。

【★写真27】CAP
ゲートの搬送シーン。連動する2対のカニハサミで把持し、グリップ力をバネで調整。
特に面白かったのが足回り。他校は四輪駆動ですが、なんと同校の駆動部は一輪のみです。これも人数が少ない故の苦肉の策とのこと。前方の車輪を差動機能(ディファレンシャルギア)付きにして、操舵時にスムーズにロボットの向きを変えたり、前後に移動したりと工夫を凝らしていました。設計者によれば、このアイデアは、同期を取らずに一輪のみで動くフォークリフトの機構からの着想とのこと。残りの後部車輪は前輪に追従して動きます【★写真28】。
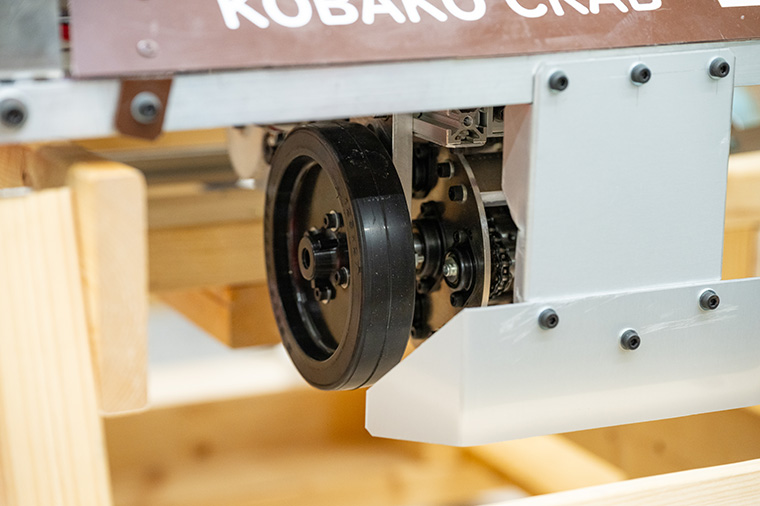
【★写真28】CAP
足回りの駆動系。駆動するのは前輪のみで、後輪の2輪には動力がついていない。
電装部も端子台で美しく配線し、トラブルがあっても迅速に対処できるようにしていました。この辺りは安全性に関わるところですが、目に見えづらい部分です。そもそもモータも5台しか使っていないため、電装系がシンプルになります。マブチモータのDCモータ・555シリーズや、ツカサ電工の小型DCモータのほか、あえて仕様不明の中華製モータも採用。データシートがないため、トルク特性などを自分たちで測って使うことで、プラスアルファの技術習得に役だったそうです。
【アイデア倒れ賞】鈴鹿高専「鈴観音」
 【★写真29】
【★写真29】
良い意味でのアイデア倒れ賞を受賞したのは鈴鹿高専チームでした。アイデア倒れといっても、実はコンセプトはロボットの全自動化というハードルの高いものでした。ロボット本体は外装を金色にした神々しい観音をイメージしており、愛らしい猫の顔まで付けていたのが印象的でした【★写真30】。
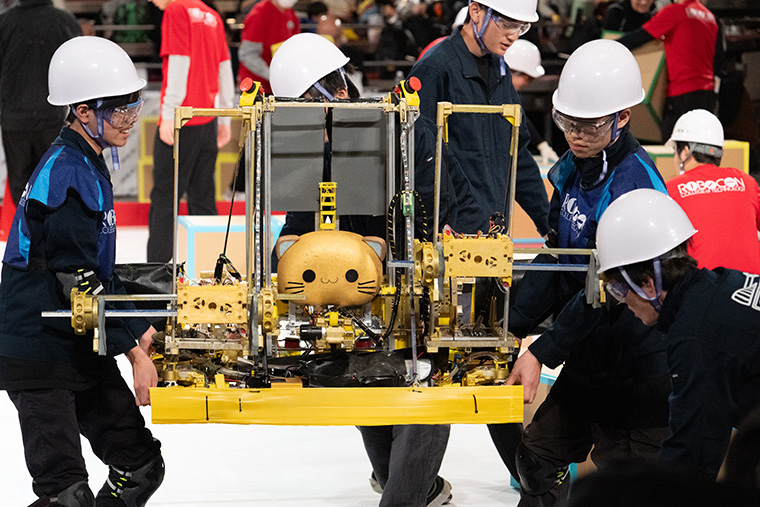
【★写真30】
ロボット正面には、マスコットキャラとして愛らしい猫の顔が付いていた。
ロボットアームには、独特な扇形のハンドが付いており、約1mの幅でアームを展開してから、挟み込むようにして共有ゾーンにある長尺のボックスを把持できます。さらにボックスごとZ軸方向にも回転させ、リフティングしながら、ゲートの土台の下にボックスをもぐり込ませ補充していくことが可能です【★写真31】。
【★写真31】
独特な扇形のハンドで挟み込むようにしてボックスを把持できる。
また台車も大きな特徴の一つでした。他校の台車は一人乗りですが、同校では最大3名まで搭乗が可能です【★写真32】。みんな仲良く台車に乗れるように、高荷重でも耐えられる設計とし、ロボット本体との連結にもマージンを設けています。またタイヤは独立ステアリング機構で、前後左右をスムーズに駆け回れるようになっていました。

【★写真32】
みんなで乗れば喜びも倍増! 最大3名まで搭乗可能な台車。
本番の試合では、自動運転のためロボットの始動に少し手間取ることもありましたが、無事にスタートできました。しかし、作り置きのゲートを搬送する際にボックスが崩れてしまうハプニングがあり、残念ながら複数人が搭乗できる台車の動きまではみられませんでした。
【特別賞(本田技研工業)】富山高専(本郷)「カニメイト」
 【★写真33】
【★写真33】
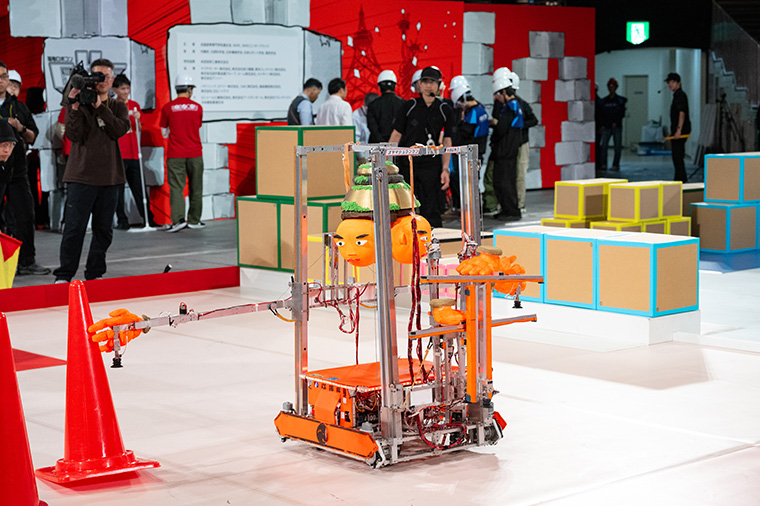
特別賞(本田技研工業)の富山高専(本郷)は、富山県の名産品の紅ズワイガニをモチーフにした印象的なデザインでした。ロボット本体には独立した5つのアームがあります。これらを3人の操縦者が分業体制で同時に動かすため、かなり練習を要したようです。このほか本体の足回りにはメカナムホイールを採用し、自在に動きながら着実にボックスを積み上げ、ゲートを構築できる機動性を確保していました。
本体のフロントアームには昇降機構があり、ゲート最上部となるボックスを容易にリフトアップできます。またサイドアームのほうは、昇降機構によってゲート増設時に下方からボックスを追加するためのスペースを確保することが可能です【★写真34】。
【★写真34】
ボックスのリフトアップ。サイドアームでゲート増設時に下方からボックスを追加するスペースも確保。
一方、アンダーアームには共有ボックスを吸い付ける吸着盤と、専有ボックスを持ち上げるアームスライド機構が付いています【★写真35】。実は、このスライド部のラックに秘密の工夫がありました。普通のラック&ピニオン機構はラックが直線的ですが、わざわざカーブするように3Dプリンタで設計しているのです。この湾曲によって、アームで把持したボックスが接地しないように、横移動に加えて上下方向にも動く仕組みになっています【★写真36】。
【★写真35】
アンダーアームの吸着盤によって共有ゾーンのボックスをピックアップする様子。
【★写真36】
湾曲する設計のユニークなラック機構。この曲線に沿ってアームが上下に動く仕組み。
一方、台車のほうは本体に素早く連結できるように、爪を下ろして本体に引っ掛ける方式を採用していました。また着座部には、便利なホンダの折りたたみシートを採用して搭乗者の座り心地を確保していました。
【特別賞(マブチモーター)】米子高専「蜈蚣」(むかで)
 【★写真37】
【★写真37】
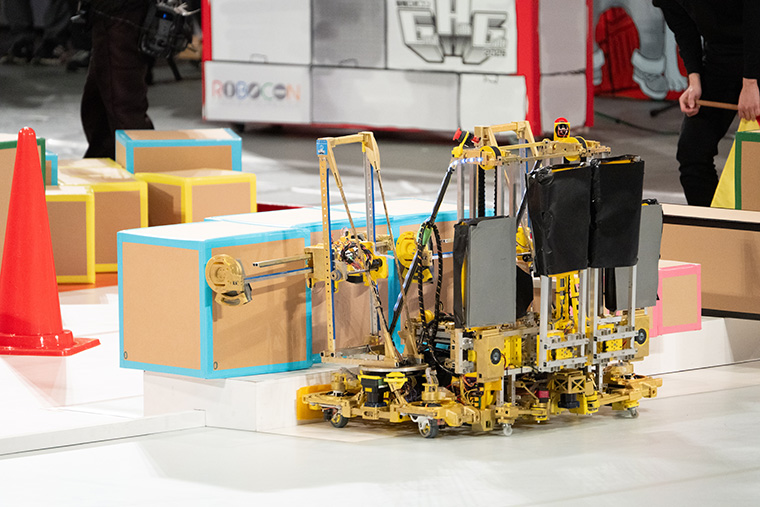
米子高専のロボットは、本大会でも唯一無二のデザインが印象的でした。プロジェクト名のとおり、2つに畳まれた本体が展開し、まさにムカデのように細長く変形することが大きな特徴です。ロボットが展開するときは、L字結合でロックをかけて安全に固定します。全部で8つある車輪はオムニホイールを採用し、それぞれにサスペンションを付け、床への密着性を高めていました。また各車輪にサスペンションを付け、ゲート搬送時の揺れを吸収します。機体にセメダインのガムテープを使ってくれたとのこと、お役に立てて大変嬉しかったです!
さて本試合では、長い胴体を生かし、3つのパイロンを同時に作業エリアに運んで、最初に15点をゲットしていました【★写真38】。次に作り置きした280cmゲートを搬送しました。このゲートはピラミッドのようにボックスを三角に積んで安定化させる工夫が見られました。
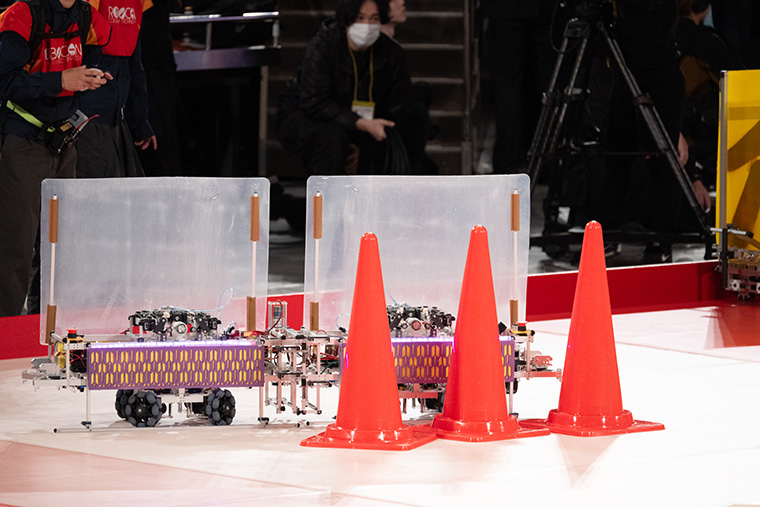
【★写真38】
展開した本体の幅を活かして、一挙にパイロンを押し出す作戦だ。
特徴的な点はゲートの搬送方式です【★写真39】。「万歳機構」と呼ぶ機構を下ろし、プラスチック製クリアファイルをボックスと床の間に差し込んで、引きずりながら作業エリアまで持っていきます。クリアファイルを外すときは、ロボットに収納された押出し機構により、ゲートからシートを外します。この機構は、釣り竿のように複数段に伸びる仕組みになっていました。
【★写真39】CAP
ユニークなゲートの搬送方式。ボックスと床の間にクリアファイルを差し込んで引きずる。
ロボットと台車の連結にはスナッチロックを使用し、ラチェット機構によりロボット側の操縦のみで上手く連携できるようにマージンを取ったとのこと。ゲート幅が50cmとかなり狭いので、台車も30cmとギリギリに設計してあり、通過時に搭乗者がゲートに触れないように、左右にシートを付けていました【★写真40】。また周回しやすくするために、全国大会では台車の前輪をオムニホイールに換える改造も加えたそうです。
【★写真40】
狭隘なゲートの通り抜け。ロボットが細長いため、そのスペースに詰め込む部品は緻密で高密度だという。
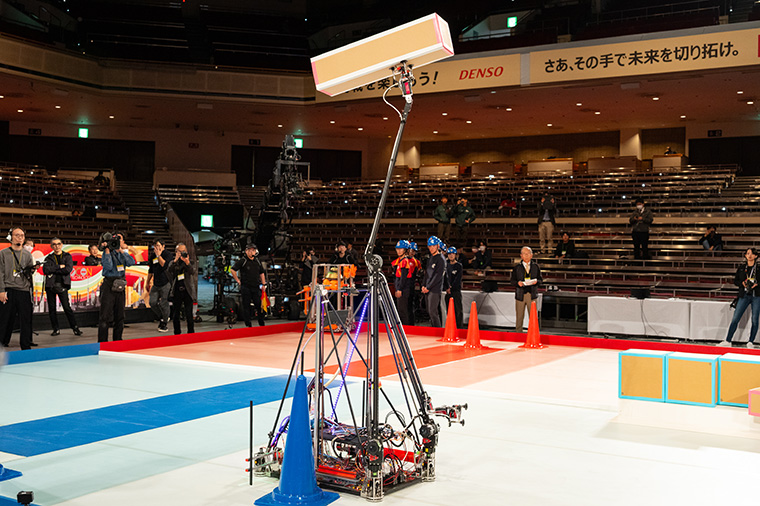
【特別賞(安川電機)】鹿児島高専「凱旋」

【★写真41】
特別賞を獲った鹿児島高専は、美しい3角形フォルムが対になったデザインが印象的でした。ロボットの大きな特徴は、強力な吸引力を持つ自作の4気筒真空ポンプを搭載していること。この真空ポンプと、前後に装備した計4つの吸着盤によって、ボックスを一気に回収できます【★写真42】。
【★写真42】
ロボットを斜め正面から見たところ。前後に2ヵ所ずつ吸着盤がある。
同校のロボットは、 パイロンを高速で押し出すための専用アームも搭載しています。これを瞬時に下ろすことが可能です。足回りには爆速で移動できる四輪独立ステアリング機構を採用しており、機体の最高スピードは秒速4m(時速14.4㎞)と高速で、さらに一部の移動も自動化しているとのことでした。
これにより、たとえば共有ボックスゾーンへのアプローチを自動化できます。ゲート構築に必要な共有ボックスを2往復して迅速に奪取します【★写真43】。ただし本試合では、あまりにも機体のスピードが速かったようで、共有ボックスゾーンに突っ込んでしまうというハプニングもありました。
【★写真43】
前方の吸着盤を利用して立方体のボックスを2つ同時に取っているところ。
同校は、専有ゾーンで事前にセッティングした柱に、回収した共有ボックスを載せて190cmのミニゲートを構築し、それらを搬送したのちに、土台となるボックスに載せて、370cmのグレートハイゲートを完成させる作戦を練りました。このゲートを構築する際、ミニゲートをリフトアップするためのロジャーアーム機構が、機体の両脇に搭載されていました【★写真44】。
【★写真44】
ロジャーアームは静かに、上方に大きく展開してミニゲートを持ち上げます。
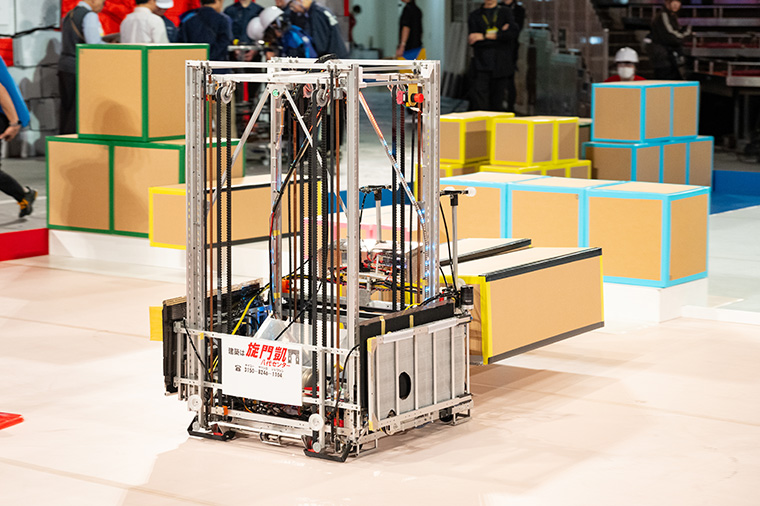
【特別賞(東京エレクトロン)】熊本高専(八代キャンパス)「建築は旋門凱」
 【★写真45】
【★写真45】
熊本高専(八代キャンパス)は、全国大会で優勝した実力校らしく、最高420㎝のグレートハイゲートの高みを目指しました。同校のロボットは、専用アームと吸着機構により、超高速でボックスを回収できます。ロボットを高速に動かすために、いくつかの工夫を凝らしていました。
まずはロボットの主要部材に炭素繊維強化プラスチック(CFRP:Carbon Fiber Reinforced Plastics)を使用し、強度と軽量化を図ったこと。吸引のためのポンプモータも高出力な製品を選び、ボックスをしっかり把持できます。本体の足回りには独立ステアリング機構を採用し、自由自在な方向転換に対応。
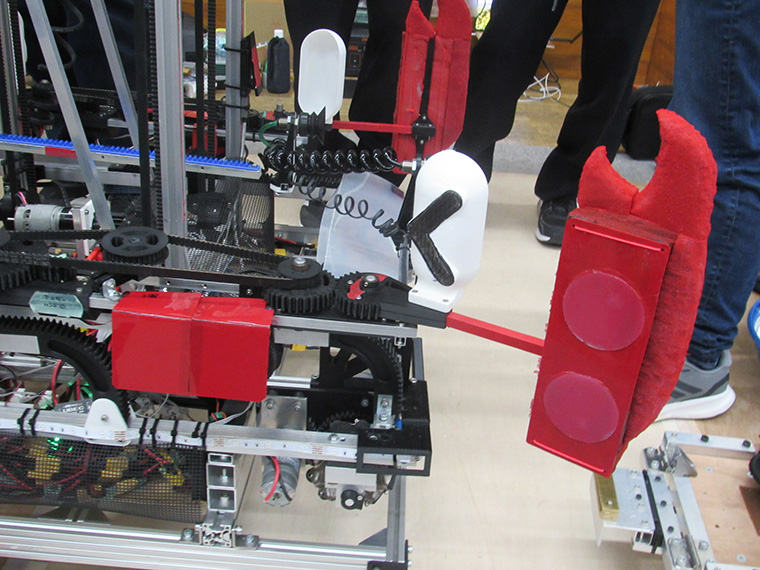
長さの異なるボックスをはさむサイドハンドの動作は、モータとラック&ピニオンで行います【★写真46】。長尺の共有ボックスを取るときは、2本の吸引機構によって横から同時に取り出し、さらにサイドアームを使って上手に立てます【★写真47】。本試合では、ボックスの端をハンドでつかみながら、回転させて直立させる「熟練のわざ」を披露していました。
【★写真46】
サイドハンドによるボックスの把持。青いラック上に沿ってハンドが動く。
【★写真47】
長尺の共有ボックスの取り出し。強力な吸引機構で吸い付けて取り出す。
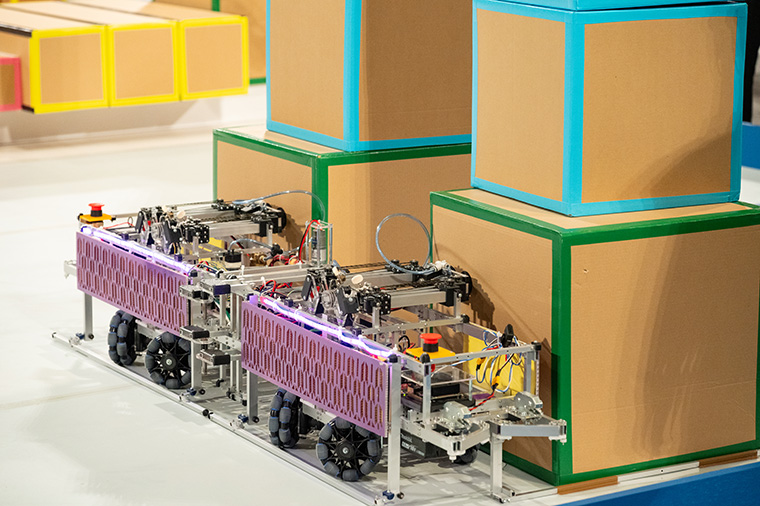
この長尺ボックス上に、さらに235cmまで伸びるリフティング機構でゲートを積み上げれば、グレートハイゲートの完成となります。ただ本試合では、最後のギリギリのところでボックスが崩れ落ちてしまい、あえなく一回戦で敗退となりました。しかし相手が旭川高専だったこともあり、実質上の決勝戦といってもよい試合でした【★写真48】。

【★写真48】
グレートハイゲートの構築。長尺ボックスにミニゲートを載せて、さらにリフティングして土台に搬送。
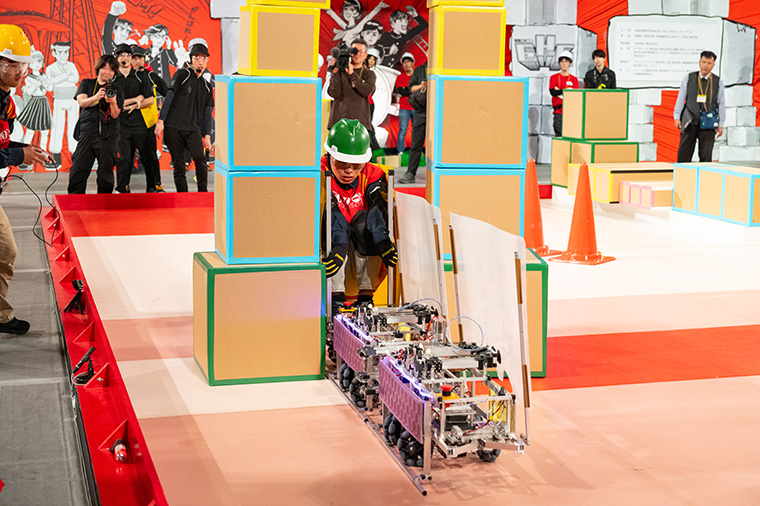
台車のほうはゲートが完成しなかったため、試合では通り抜けを披露できませんでしたが、ロボット本体と連結するための自動機構や、本体と同様に車輪にオムニホイールを採用していました。もちろんブレーキ機能も備え、安全性を確保していました。
【特別賞(田中貴金属グループ)】一関高専「猩猩」(ショウジョウ)
 【★写真49】
【★写真49】
一関高専のプロジェクト名は「猩猩」(ショウジョウ)。最初はコンパクトなロボットのように見えますが、実は非常に高密度に折り畳まれた状態で本体にアーム機構が収納されており、展開すると左右に大きく3mほど広がる設計になっています。この展開の様子が、まさにオランウータンが長い手を広げた姿に似ているという理由で猩猩(和名はオランウータン)と名付けられたそうです【★写真50】。

【★写真50】
複雑なアームの展開。左右の垂直パイプに対して上下移動が可能なハンドが付いている。
同校のロボットは、このアーム展開により、包み込むような形でボックスなどを同時に積み上げながら、素早くゲートを構築できる点が大きな特徴になっています。機体には吸着盤があり、共有ボックスを上面から吸い付けて、ロボット内部に引っ張って回収できます【★写真51】。
【★写真51】
ロボット内部にボックスを引き込んで、搬送時の落下を防げる独自の工夫だ。
専有ボックスの把持は、左右両サイドに配置されたハンド部の爪が常に平行になるように動き、確実にボックスを把持できる構造です【★写真52】。 さらに、この機構はゲートを積み上げる際にも使えます。パイプに等間隔の穴が空けられており、その穴にスプロケットがハマって、ラック&ピニオンのようにハンド部が動く仕組みです。ボックスの位置調整にも使われます。
【★写真52】
ボックスをはさんでいる赤い爪のハンドが該当の部分。パイプには等間隔の穴が見える。
機体の足回りもユニークで、3輪ステアリングを採用し、方向転換もスムーズに行えます。
またコンパクトな台車のほうは、小型のスナッチロックで本体と確実に連結できます。時短のために、この方式を採用しているチームは多かったようです。
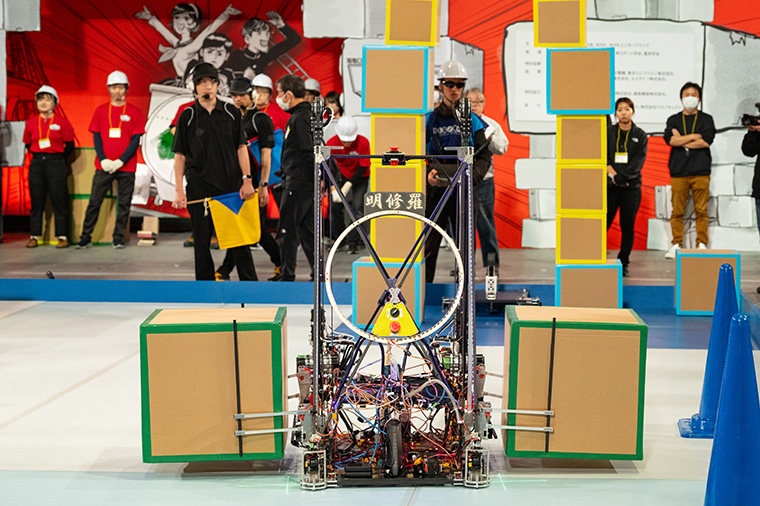
【特別賞(ローム)】東京高専「明修羅」
 【★写真53】
【★写真53】
毎年デザイン性と機能性に優れた完成度の高いロボットを製作して、全国大会まで勝ち進んできたのが東京高専チームです。今回のロボットは、まるで阿修羅のような多関節アームを備えていることから「明修羅」というネーミングにしたそうです。いろいろなボックスを臨機応変に取れることが大きな特徴です。
6本のアームのうち、2本の6自由度の多関節アームは先端に吸着盤を備え、自動で共有ボックスを回収できる機能を備えており、クレーンのように1本のアームだけでも機能する自信作とのこと。。天面用のボックスも、自動でアームを上方に伸ばして設置できます【★写真54】。残り4本のアームはロボットの側方に2対ずつ付いており、上下と左右の直動機構によって、全サイズの専有ボックスを把持し、昇降することが可能です。長尺ボックスを鉛直方向に立てたり、最上部用のボックスも自動で上方に伸ばして設置したりすることもできます【★写真55】。
【★写真54】
6自由度のシリアルリンクと先端の吸着盤で臨機応変なピッキングに対応。
【★写真55】
左右にある残りの4本のアームで立方体のボックスを把持。上下にも移動できる昇降機能も備えている。
足周りには機動性の高い独立ステアリング機構を採用し、狭小なスペースにその機構を詰め込んでいます。これにより、ボックスを一目散に取りに行けます。自作の「サイクロイド減速機」を付けている点も見逃せない差別化のポイントです。サイクロイド曲線は、円が直線上をすべらずに転がるとき、その円周上の一点が描く曲線のこと。イメージとしては、車輪の端に点を付けて、その車輪を地面の上で転がしたときの点が描く「波のような軌跡」です。この曲線を使ったギアの特徴は、比較的小さなサイズで高速回転を低速・高トルクに変え、バックラッシュ(歯車の遊びによるガタ)が小さく、衝撃に強い丈夫な減速機になります【★写真56】。
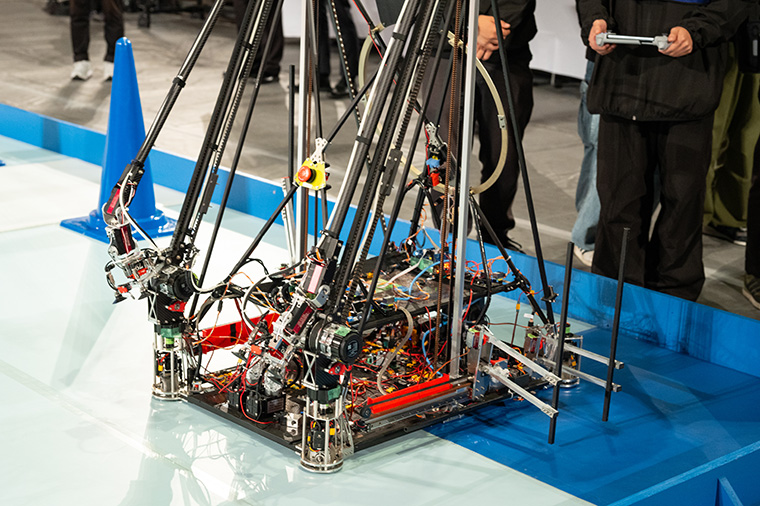
【★写真56】
写真の中央に映っている黒い円柱状のギアがXiomi製のCybeGearと自作のサイクロイド減速機。
また、足周りには機動性の高い独立ステアリング機構を採用し、狭小スペースに機構を詰め込んでいます。これにより最高5.6m/sでボックスを一目散に取りに行けます。本番の試合では、事前に組み立てた設置ゲートが崩れたり、パイロンが倒れたりと不運が続いて、本来の実力を発揮できず1回戦で敗退しましたが、そのポテンシャルは非常に高いロボットでした。
【特別賞(セメダイン)】神戸市立高専「凱船門」
 【★写真57】
【★写真57】
神戸市立高専の「凱船門」は、神戸の港町をイメージしたもので、凱旋門の「旋」を「船」の字に当て、デザインも錨のマークを配したとのこと。同校は長尺な共有ボックスをピックアップして、最大280cmのゲートを完成させる戦略を取りました。
ロボットの機構ですが、前方に2つの大きな吸盤があり、後方にも1つの大きな吸盤が装備され、ボックスの種類によってアームを使い分けられます【★写真58】【★写真59】。アームは最初は折り畳まれていますが、ボックスを取る際にはサーボモータで180度回転させて展開します。逆にゲート通過時はアームが収縮します。異なるボックスに対応するために、エアシリンダでスライドする機構をつくり、ボックスの幅に合わせられます。また最も長尺なボックスを取ってゲートを組み立てるときは、コンベア機構によりボックスを左右に移動させながら調整する工夫も凝らされていました。
【★写真58】
長尺ボックスを保持して運ぶ場合は、前方のアーム部が担当します。
【★写真59】
立方体のボックスを取る場合は、ゲートを両側から挟む二組のアームで抱えて移動させます。
本試合では、ゲートの台座部をつくり、次に柱の一部を積み上げ、最上部に長尺ボックスを置いて、さらにそれを土台に積み上げてゲートを完成させました【★写真60】。
【★写真60】
280cmのゲートを完成させた瞬間。ゲートのリフティングにはロジャーアームを採用。
このときゲートのリフティングには「火の見やぐら」のような立体的なフレームを昇降させるロジャーアームを採用。ここで4ヵ所にダブルのラック&オピニオン機構とマブチの555VCモータを使うことで、重いゲートでも高く持ち上げられるとのことでした。ゲート最上部に長尺ボックスを置くため、どうしても重心が上になり、積み込みの難易度が高くなります。そこでアーム展開機構も工夫し、ギア比を大きくしたり、リフティングに使うヒモのテンションを微調整したりすることで、安定した形で積み上げられるようにしたそうです。
また足回りの駆動系には、独立ステアリング機構を採用し、小型サーボモータで全方位制御を行います。駆動系モータもマブチの555シリーズなのでパワフルに移動できます。台車には360度自在に動くオムニホイールを使い、床に滑り止め素材を押し当る摩擦ブレーキ機能も備しています。台車はドアロックの機材を転用して、自動で本体と連結されます。
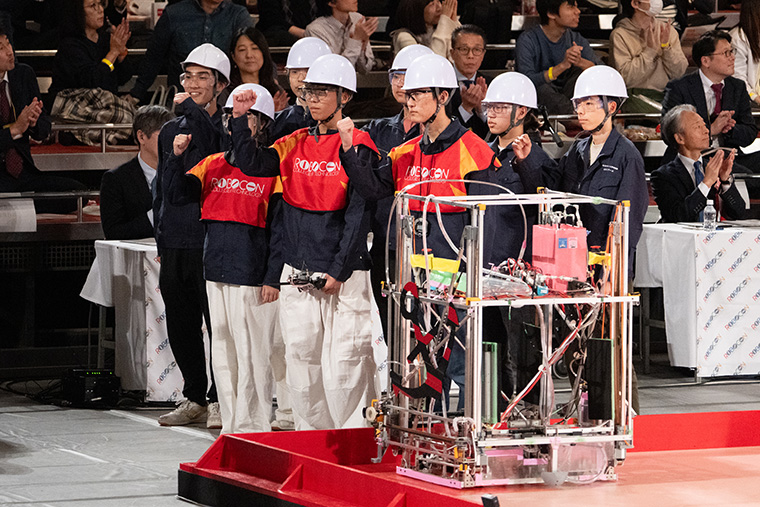
【特別賞(デンソー)】小山高専「オヤマシュラン」
 【★写真61】
【★写真61】
小山高専のロボットは、オヤマシュランの名前のとおり、阿修羅像を3Dで設計し、その顔を搭載しています。本体には、それぞれ役割が異なるアームを前後に搭載しています。折り畳み展開するフロントアームは、ボックスを挟み込んで一気にピッキングできます。また吸着盤でボックスを吸い付けて持ち上げられる昇降機能も装備しています【★写真62】。一方、バックアームは、展開時に2m超の長さに伸び、3つのパイロンを一気に移動できます【★写真63】。このアーム先端には吸着盤があり、共有エリアでのボックスを回収することが可能です。
【★写真62】
ボックスを挟み込むだけでなく、吸着盤で昇降機能も備えているフロントアーム。
【★写真63】
2m超の長さに伸びて、パイロンを一気に移動できるバックアーム。
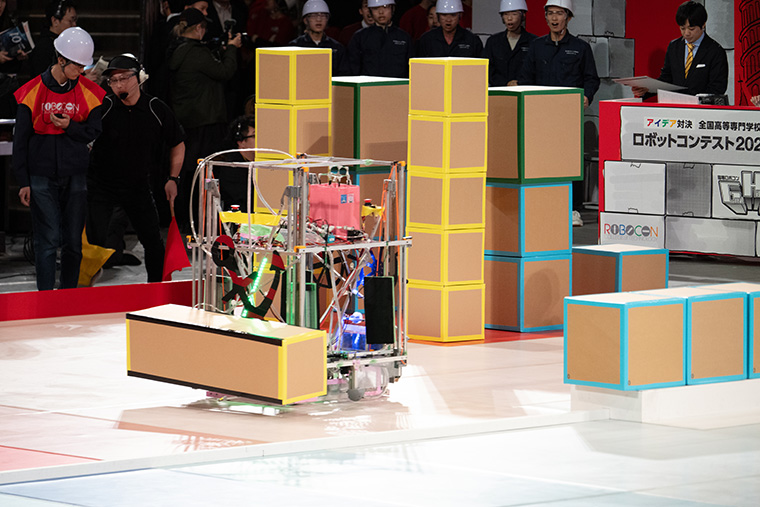
ロボットの足回りには、大径のオムニホイールを採用しており、高速かつ自在な走行を実現しました。また板バネによる独自のサスペンションも追加することで、安定した高速走行をサポートしています。これらの工夫から、本体に台車を連結しても、操作性が損なわれず、パワフルな動きが可能になるとのこと。台車についてはコンパクトな設計で、タイヤの位置を微調整することで、小回りとスムーズな旋回ができるようにしていました【★写真64】。

【★写真64】
台車と連結し、ゲートを通過。周回得点を安定的に重ねることができる。
本試合で特にこだわったことは、とにかくゲートを完成させ、倒さずに通過することでした。ゲートの高さは、30㎝の立方体を5個積み上げ、最上部には1mmのボックスを長尺アームで載せたシンプルな構成にしました。ゲートの高さは150㎝超なので、高さによるポイント加算は難しいものの、そのぶんゲート旋回による得点を稼ぐ作戦です。これは旭川高専と同様のアプロ—チでした。毎年全国大会に出場する同校ですが、今回は全員がロボコン初出場でした。しかしチームワークもバッチリで、メンバーの雰囲気も良かったようでした。
ライター:ゴルゴ31











 ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり