ものづくりLoversのためのメディア
小学生ロボコン2021-2022全国大会にいってきた!(前編)

小学生ロボコンって?
小学生ロボコンは、2019年から新たに始まった小学生を対象にしたロボットコンテストです。より専門性の高い人材を増やすべく、STEM教育が2020年より日本でもカリキュラムとして導入されました。子どものころからパソコンでプログラミングをする、ロボットを組み立てるなどの経験の中で成長することで、「自分で学ぶ力を養う」という取り組みです。
小学生ロボコンは、アイデアを生かして「ものづくり」に取り組みながら、プログラミングも学べる、小学生を対象にした大会です。課せられたミッションをロボットでクリアすべく、小学生たちはアイデアを練り、自らロボットを制作し、試行錯誤を繰り返します。
開催から3年、新型コロナウイルスの影響によりリアルでの全国大会は未だ一度も開催できていない小学生ロボコンですが、今年ついにサンシャインシティ噴水広場でのリアルとオンラインのハイブリッド開催が実現しました。
予選を勝ち抜いた23人の小学生がオンラインでパフォーマンスを披露し、我々はサンシャインの大型モニターでそれを拝見し、審査します。

このミッション、あなたならどうする?
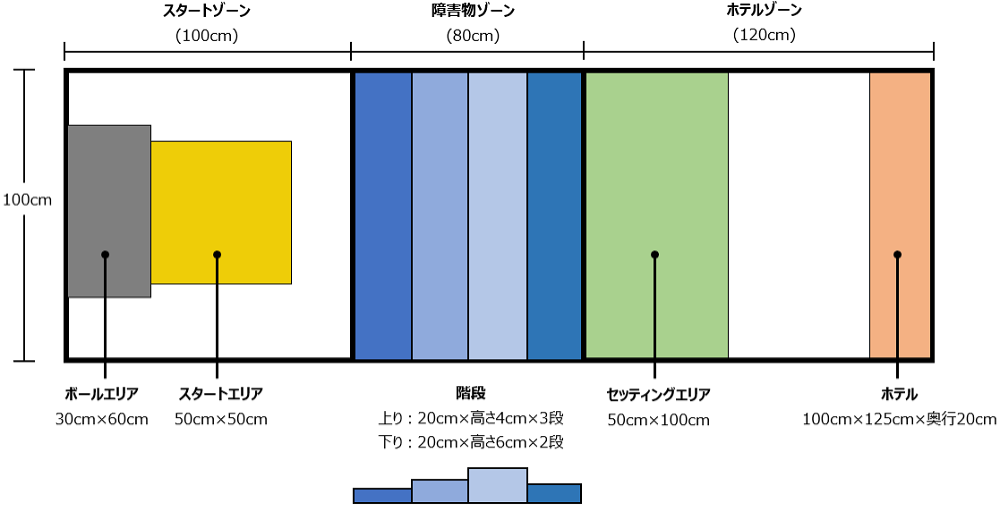
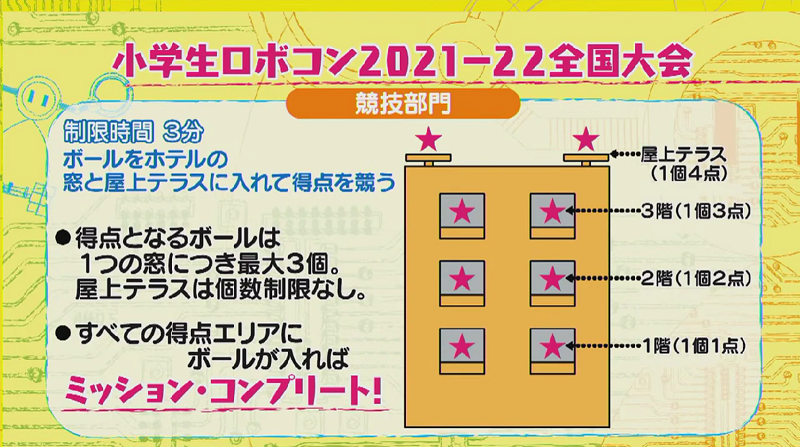
今年の課題は「Hotel The Moon2」。フィールド手前におかれたボールを回収し、段差を乗り越えながら運んで、ホテルの窓、そして屋上にボールを届けます。1階~3階の窓それぞれにボールを入れてからでないと屋上テラスへはアプローチできません。
使用できるモーターは全部で4つ。使用できる材料も、スタート時の機体のサイズも指定されています。
アイデアと同時に、その通りに動くロボットを作れるか、という技術力も必要になる本課題。
あなたならどんなロボットで、どんな風に課題をクリアするでしょうか?

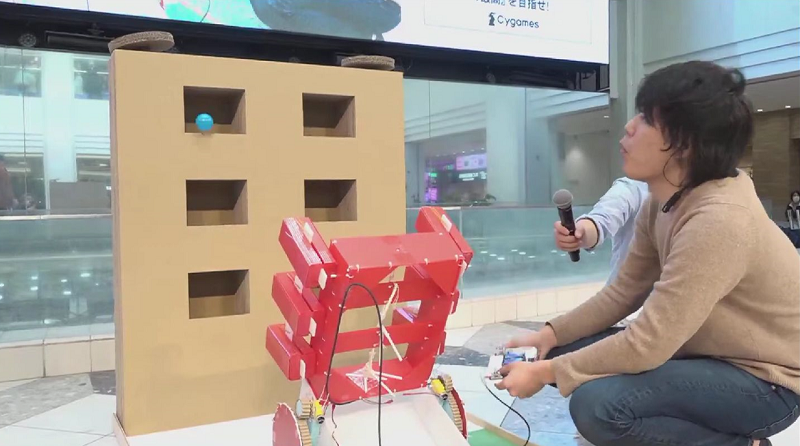
サンシャインシティ噴水広場にフィールドを再現
元高専ロボコニストの解説役、花守さんも挑戦
小学生ロボコストたちの「答え」はこれだ!
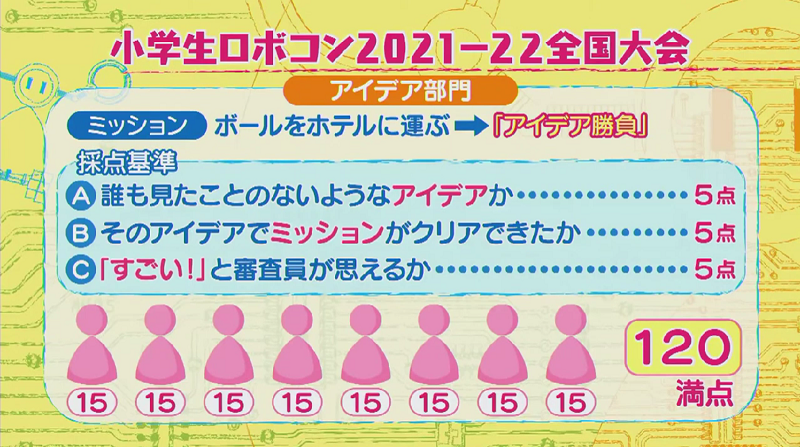
今年は、ミッションコンプリートまでの時間を競う「競技部門」と、全てのミッションに挑戦する必要がなく、特定のミッションに絞ってクリアするための唯一無二のアイデアを競う「アイデア部門」にわかれて審査を行います。
▼競技部門のルールと得点方法
▼アイデア部門の審査方法
スピードを重視するか、特定のミッションをクリアするために特化したアイデアを練るかで
- ボールの集め方
- 段差の渡り方
- ボールの入れ方
それぞれの動きも変わってきます。
ここからは、出場者のキラリと光るアイデアを紹介していきます。唯一無二の発想、そして大人顔負けの技術力、エンジニアリングの集大成をご覧ください!
1.ボール回収アイデア
ロボットがボールを回収するとき、どんな動作が必要でしょうか。
ここからは、モーターを使ったアイデア、モーターを使わずボールを回収するアイデアそれぞれをご紹介します。
大畠さんは、力強いショベルカースタイルでボールをすくいあげ、大量に機内に納めます。後半の動作も考慮し、電池を消費しすぎないよう、3回の操作でなるべく沢山のボールをすくえるよう機構を工夫したそうです。

同じくショベルカースタイルで挑戦した谷口さんのロボット。安定感があり、短時間で確実に回収できるよう、細部まで調整がされています。
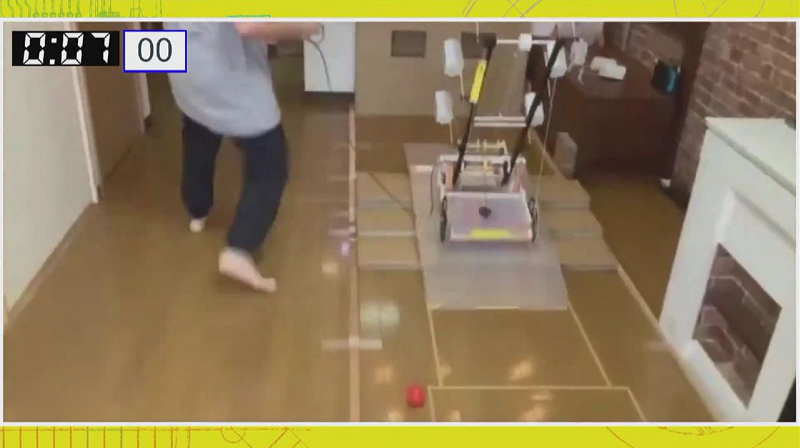
軽量化のために敢えてモーターを3つしか使わないチャレンジングな機体をつくったのは、長谷川さん。塵取りのように、壁側に押し込むだけでボールを回収できる機体にすることで、モーターを使わずミッションクリアに成功しました。

クジラをコンセプトにした中川さんのロボットは、ボール回収の動作もクジラそのもの。オキアミを飲み込むようなダイナミックな回収が見どころです。着脱可能な開口部は、小さくすることでボールの脱落を防いでいます。それゆえ、ボールがいくつ機体に回収されたかが見えづらいのですが、ボールの並べ方を工夫し、フィールドに残ったボールの残量から直感的に何個ボールを回収できたかわかるようにしたそうです。脱帽!
2.段差攻略アイデア
ホテルへと続く階段は実は一番重要なポイント。ここをクリアできないことには、得点ゾーンに辿りつけません。ただ昇るだけでなく、傾いた時に転倒するリスクを避けるためのバランス調整が必要です。機体の軽量化で臨むのか、重心の位置を工夫してクリアするのか、アイデアを見ていきましょう。
谷口さんは段差を安定してのぼるために足回りをベルト状にし、クローラースタイルにして臨みました。通常のタイヤだと苦戦する登り部分ですが、クローラーにすることで力強く段差を昇ることができます。ホテルへの移動を確実に行うことでロスを減らし、短時間でのミッションコンプリートにつなげました。お見事!

金子さんのタイヤは前輪が三輪型。実はものすごく理にかなった形状で、実際に階段昇降用キャリーにも採用されている機構だったりします。三輪が段差を的確にとらえ、空回りすることなくスルスルと昇降をクリアしていきました。機体にはスタイロを使用しており、機体の軽量化も考慮されています。
大畠さんのタイヤは10個の試作を経てたどり着いた意欲作。スタイロフォームでできた機体は、各所が肉抜きされており軽量化されつつも機体の強度が損なわれない構造になっています。この軽い機体による「跳躍力」によって、1段目をうまく跳ね上げればそのまま弾むように一気に上まで上りきることができるのです。その勢いをホテルにぶつかることで相殺するなど、転倒の対策も抜かりなしです!
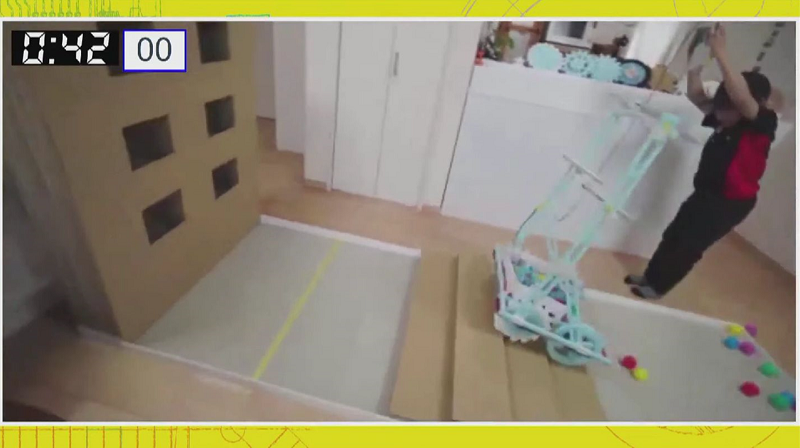
段差のうえに橋やスロープを渡して突破するアイデアも複数ありました。端山さんのスロープは巨大で丈夫なプラスチック製です。機体にセットされた板を段差側に倒すことで、まっすぐ正確なスロープづくりに成功しました。段差がなくなる代わりに傾斜がついてしまい、機体の転倒リスクが上がりますが、「ホテルエリア側で転倒した場合はホテルエリア側からリトライが可能」というルールを上手に使い、最小限のロスで段差をクリアしました。
同じくスロープで挑んだ高木さんは、スロープになる板を「投げる」ユニークな機体です。ロボットが展開しながらスロープ部分をはずす、1つのモーターで2つの役割を発揮します。飛ばし先がややランダムになるため、まっすぐなスロープを作るのに苦戦していましたが、モーターを上手に使ったアイデア作です。
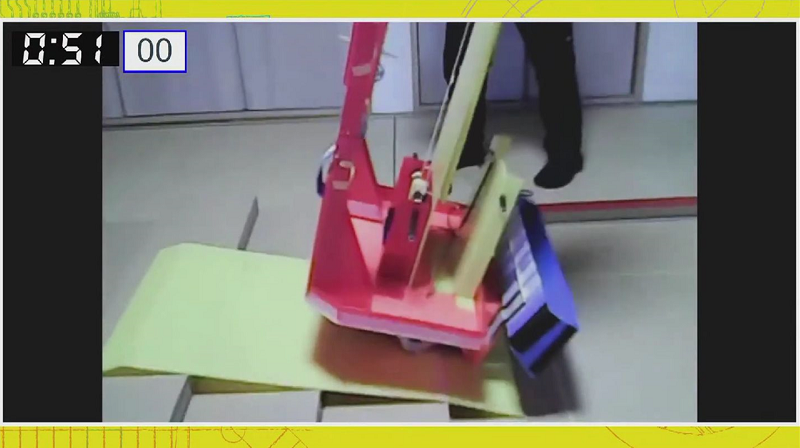
金田さんのスロープは下り部分まで覆える大型です。下り側の段差もスロープにしてしまうことで、降下時の転倒リスクを回避しました。スロープづくり→ボール回収がワンアクションで行える設計にし、更に段差エリアでのなめらかな移動を実現することで、2つのミッションをわずか10秒でクリアしてしまいました。
3.ボールの入れ方
ホテルエリアに到着したらいよいよボールをホテルの窓とテラスに運びます。
屋上の「テラス」は、1階~3階すべての窓にボールを入れてからでないとアプローチできません。アプローチの仕方も十人十色。どんなアイデアが飛びだすでしょうか。
大畠さんの機体はテラスにボールを運ぶ機構の制作が間に合わなかったため、できる範囲で最大限の成果をあげる工夫をしました。上層階の窓に3つずつボールを流し込める作りにすることで、大量得点につなげ、競技部門最高得点を記録しました。ホテルにロボットをぶつけた衝撃でボールを流し込む作戦でしたが、万一うまくいかなかった時はモーターで坂を調整して流し込めるように対策していたそうです。

ボールを窓に運ぶ方法として、亀田さんは射出にこだわりました。微細な位置調整と角度調整が必要になるため、射出機構でのミッションは非常に難しいのですが、6回の作り直しを経て、本番では見事3階の窓にボールを投げ入れることに成功しました。打ち上げ式にしたことで重心位置がさがった結果、操舵性がよくなり転倒リスクも下げられたとのことです。

クジラをモチーフにした中川さんのロボットは、ボールを運ぶ機構をクジラの潮吹きに見立てました。射出口は1か所だけで、潮を上下にのばして1段ずつ確実にボールを入れていきます。この機構は糸の巻き上げにより収縮する仕組みになっており、安定したスムーズな運搬が可能です。見事95秒でミッションコンプリート(6つの窓、2つのテラス全てにボールを運ぶ)しました。

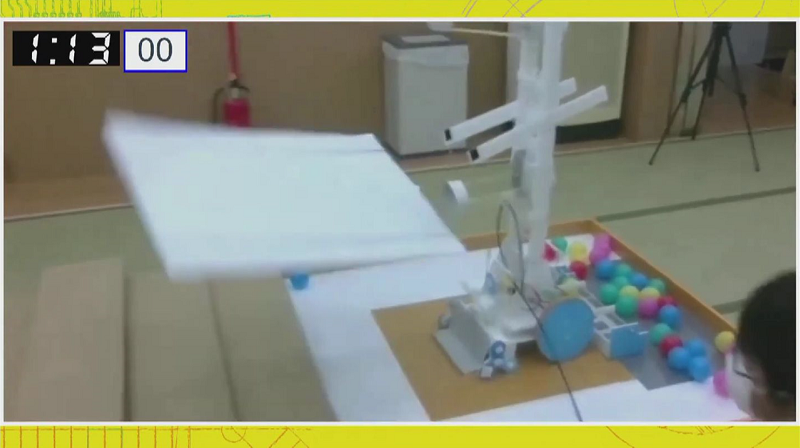
上層階へのボールの届け方に創意工夫が光ったのは花田さんのロボット。木工のどっしりした機体から展開されたX字の巨大なアームが特長です。アームは傾き・ボール装てん箇所の位置調整までしっかりとされており、一度の装てんで3階窓2か所と屋上テラス2か所にボールを置くことができます。ユニークでありながら正確で、かつロマンを感じさせるダイナミックな展開に、会場からは歓声があがりました。

4.機体のこだわり部門
今回ロボットに使用できるモーターは4つと決まっています。参加者はそれぞれ、機体のどこにモーターを使用して3つのミッションをクリアするかアイデアを発想する必要がありました。
そんな中、軽量化のために敢えてモーターの積載量を減らす選択をしたのが長谷川さんです。ボール回収・ホテルへのボール運搬いずれにも専用のモーターを使わず、ロボットをコースやホテルに「押し付ける」だけで物理的にクリアできるよう、工夫が凝らされています。

競技部門の決勝ラウンド進出者は?
決勝ラウンドは、予選会を勝ち抜いた10名のロボコニストが競い合う競技部門の上位3名が進出いたします。決勝ラウンドに進出するは、花田勘太郎さん、金田理史さん、金子史哉さんの3名です。
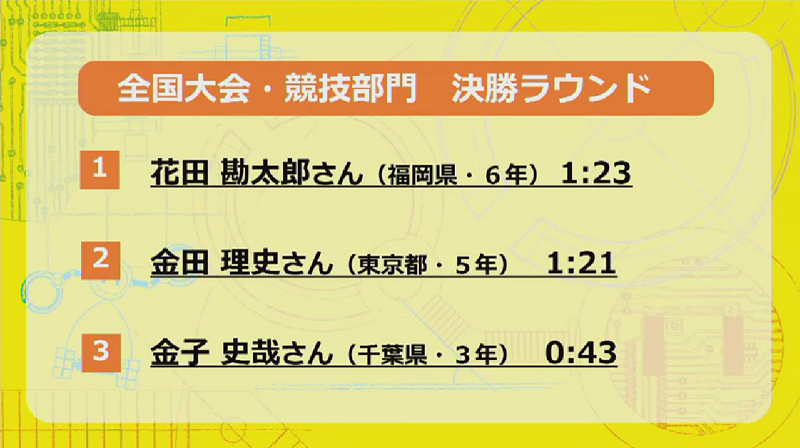
この後、アイデア部門の競技後に決勝ラウンドが開始されます!





関連記事
-
 ものづくり
ものづくりあの「ガシャッ」をもう一度! ファミコンのカセット交換みたいなセンサーガジェットを作った
2026年07月21日 -
 ものづくり
ものづくりAIの時代に、手を動かす意味——ICOMA生駒崇光のプロトタイピング哲学
2026年07月10日 -
 ものづくり
ものづくり先輩からつながった“強豪校”への思いが大会史上“最高”のゲートに結実!(熊本高専熊本キャンパス)
2026年06月26日 -
 ものづくり
ものづくり3種の接着剤を使いこなせ!セメダイン使い分け工作選手権
2026年06月19日 -
 ものづくり
ものづくり出来上がった瞬間に“無”に帰しようとする時間をものづくりで表現する−−−−造形家・竹谷隆之が語る造形への思い
2026年05月29日 -
 ものづくり
ものづくり【高専ロボコン2025全国大会レポート(後編)】~ロボコン大賞ほか、個性がキラリと光る各賞受賞のロボットを大紹介!
2026年05月15日 -
 ものづくり
ものづくり小学生のロボコンが抜群に面白いのはなぜか!?その答えがここにある「小学生ロボコンを振り返る会 2025」
2026年04月24日 -
 ものづくり
ものづくり30年分のロボットを保管する小山高専「なんなら全部動きます」
2026年04月17日 -
 ものづくり
ものづくり稼げる工房の作り方——「ここにしかない」をつくる独創的な方程式とは
2026年04月10日 -
 ものづくり
ものづくり電子工作×推し!光るフロートで推し接着剤をパレードさせる
2026年04月03日
タグ一覧