小学生ロボコンがすごいらしい。小学生なのに超ハイレベルらしい。前々からそんな話は聞いていました。
そう聞くと、逆に「天才小学生たちがよくわからないロボット工学の技術を駆使して戦う難しい大会」、みたいなイメージになりません?あるいは、「そうはいっても小学生、たかが知れてるでしょ」と思う人もいるかもしれません。
ところが実際に全国大会を見てみたら……どっちでもないんですよ。
そこにあったのは、「誰でも理解可能な『工作』に工夫をガチ盛りして」「あどけなさを残す小学生たちが競う」という、めちゃめちゃに親しみやすく、そしてそれだけに誰でもすごさを実感できる大会だったんです。
この記事はそんな小学生ロボコン、2025年の全国大会のレポートです!
最初の魅力は小学生のワチャワチャ感
大会は、12月7日に二子玉川ライズ スタジオ&ホールにて行われました。
まずは競技開始前の様子をお見せして、会場の雰囲気をつかんでいただきましょう。

選手席。直前まで機体の調整&作戦会議が行われていました
彼ら出場ロボコニストたちは全国から集まっていて、製作期間中はチームメイトともリモートでのやり取りがメイン。開会前の選手席では、熱心に作戦会議をしている……かと思ったら、実は久しぶりに会う仲間とのおしゃべりに花が咲いているだけだったりもしました。
 後日カメラマンから写真を共有してもらって、吹き出してしまったのがこれ。もはやロボットとか写ってない、ただのピース。上の年齢層のロボコン取材には絶対混ざってこないタイプの写真です。
後日カメラマンから写真を共有してもらって、吹き出してしまったのがこれ。もはやロボットとか写ってない、ただのピース。上の年齢層のロボコン取材には絶対混ざってこないタイプの写真です。
そしていよいよオープニング。
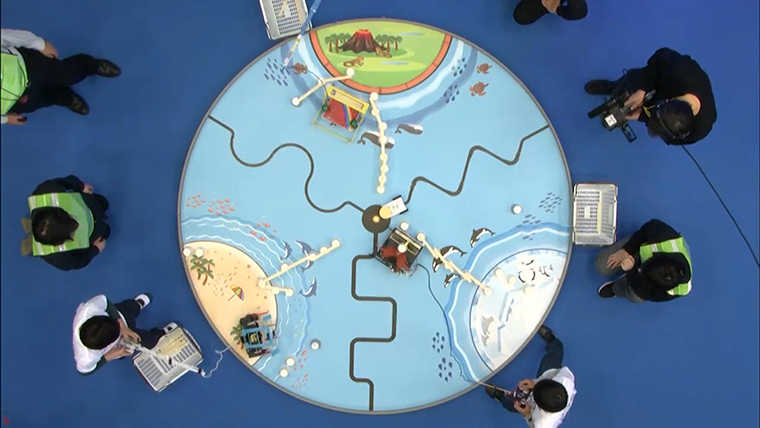
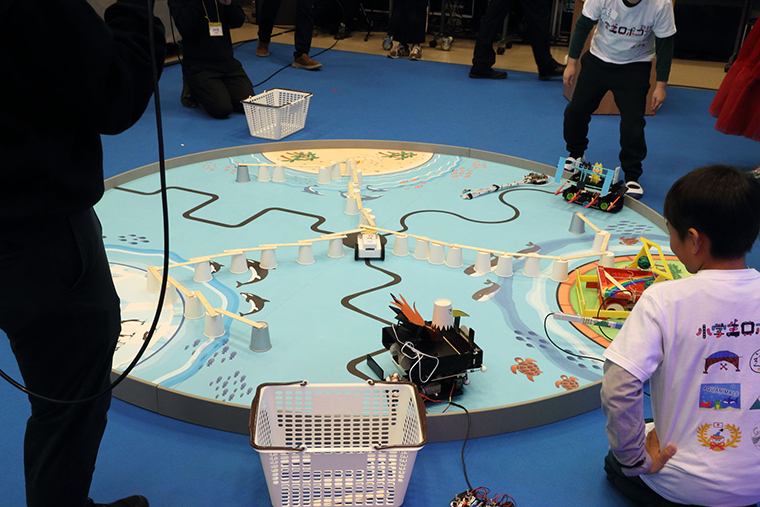
 この丸いのが、競技用のフィールド
この丸いのが、競技用のフィールド
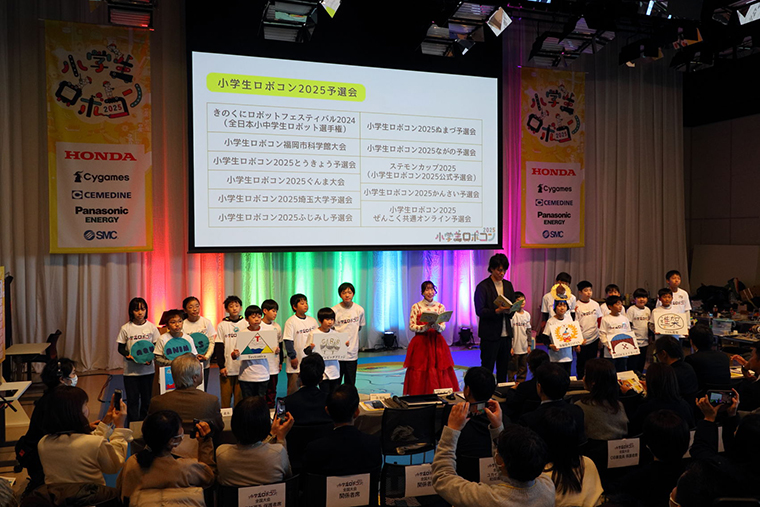
選手入場。出場チームは6チーム。1チームずつ順に競技を行い、得点を競います。それを2回くりかえす2ラウンド制。
 チームごとに決意表明。「がんばるぞ、おー!」
チームごとに決意表明。「がんばるぞ、おー!」
この「おー!」のタイミングが、揃ったり揃わなかったりするんですよね(上の写真は一回やり直してやっと揃ったところ)。しかし揃ってなくても声はでかくて元気いっぱい!というのも小学生っぽくて良い。
 めちゃめちゃ元気に手を上げたいのに腕が絡まる二人
めちゃめちゃ元気に手を上げたいのに腕が絡まる二人
このように、競技が始まるまでは小学生の小学生らしさを思う存分満喫することができます。
小学生ロボコンでは、こういった「小学生のワチャワチャ感」と、この先で紹介する「ロボットの工夫のすごさ」が両方見られます。対極にありそうな2つの魅力が波状攻撃のように次々やってくる、そこが小学生ロボコン最大の特徴なのです。
橋をかけるロボットたち
ではロボットについても、見ていきましょう。
今年の競技課題は「グレート・ビッグ・ブリッジ」。
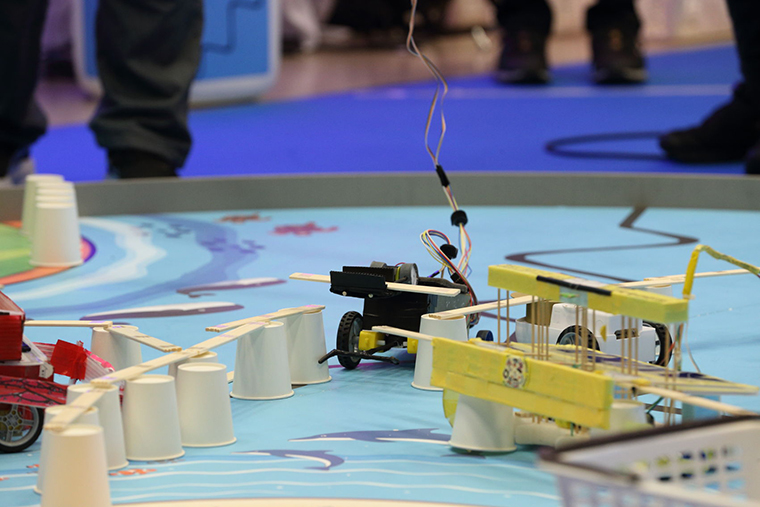
詳しいことは追って説明していきますが、ざっくりいうと「紙コップを並べて、割り箸で橋をかける」競技です。時間制限もあるので、できるだけ素早く、たくさんの紙コップを橋でつないでいきたいわけです。そのためにどうするか。
 ひとつひとつコップを並べて、橋をかけていくロボットがいれば(「ヘラクレスロボカブト」上村颯士さん)
ひとつひとつコップを並べて、橋をかけていくロボットがいれば(「ヘラクレスロボカブト」上村颯士さん)
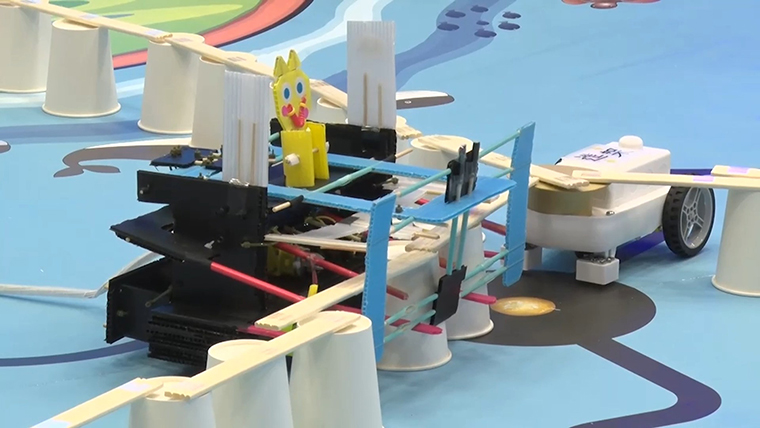
 こちらは4つまとめてコップを運び、その上に箸を乗せることでまとめて橋をかけてしまいます。なるほどね(「橋かけ侍カップ丸」井上嵩丸さん)
こちらは4つまとめてコップを運び、その上に箸を乗せることでまとめて橋をかけてしまいます。なるほどね(「橋かけ侍カップ丸」井上嵩丸さん)
 かと思えばさらに効率的。コップ最大4つと箸をセットにして運ぶことができ、そのまま置くだけで橋の完成(「AKIRA2.0改」吉沢明さん)
かと思えばさらに効率的。コップ最大4つと箸をセットにして運ぶことができ、そのまま置くだけで橋の完成(「AKIRA2.0改」吉沢明さん)
 今回いちばん大胆だったロボット。大量のコップと箸をセットにして運び、置くだけでもう長い橋ができてしまう(「ビッグアームロボ」熊谷陸久斗さん)
今回いちばん大胆だったロボット。大量のコップと箸をセットにして運び、置くだけでもう長い橋ができてしまう(「ビッグアームロボ」熊谷陸久斗さん)
この4台は、あとに紹介したものほど一気に長い橋を作れます。つまりロボットとして完成度が高いということ!……と思ってしまいがちですが、そんな単純な話ではないんですね。
たくさんのことを一気にやろうと思うほど、そのうちのいくつかがうまくいかない確率が高まります。つまり作戦に不確定性が生まれるということ。
また、競技後半になってくるとフィールドにたくさんの橋がかけられた状態で作業を進めるため、小さくて小回りの利くロボットの方が作業を進めやすくなってきます。なので一長一短あるわけです。
 黒いカブトムシが、左右に伸びた橋の最後のすき間に割り箸をかけようとしています。こういう局面では小さい機体が強い!
黒いカブトムシが、左右に伸びた橋の最後のすき間に割り箸をかけようとしています。こういう局面では小さい機体が強い!
戦略の違いがすでに面白いですよね。
そのうえで競技においては、この個性をいかにチームで活かしあい、補いあっていくかも見どころとなってくるわけです。

機体後ろに注目。中には「ボディ内にコップを格納する」なんて独自のスタイルもいました(「北斗号」工藤洵介さん)
箸ひとつ置くにも工夫のかたまり
そしてもうひとつ、今回の競技における必須動作「箸を置く」がどんな形で実装されているかも見てみましょう。
ちょっと考えてみてほしいのですが、物を狙った場所に置くロボットをつくるとき、どういう仕組みにしたらいいと思います?
きっとロボットハンドやクレーンのような、対象物をつかんで置く機構を想像する人が多いんじゃないでしょうか。
でも今回の大会ではそれは登場しません。ではどうしているかというと……
 背中にたくさん乗せた箸をベルトコンベアのように送り出して置く(「ブリッジクラブ」石川弥瑚さん)
背中にたくさん乗せた箸をベルトコンベアのように送り出して置く(「ブリッジクラブ」石川弥瑚さん)
 小さいアームで持ち上げて置く(「オカピラー」岡本宏英さん)
小さいアームで持ち上げて置く(「オカピラー」岡本宏英さん)
つかむ動作にしていないのは、決して作るのが難しいからではないんです。いや実際難しいんですけど、彼らはそれを作る技術を持っていて、過去大会にはそういうロボットも登場していました。
ではなぜなのか。実は、小学生ロボコンでは使える部品がかなり制限されています。動きを作るのに使える部品は、軸が回転運動するモーターだけ。数も4つまで。
そのうち2つは左右の車輪に使いますし、もうひとつはコップをつかむのに使うし……と思うと、箸を置くのに使えるモーターはあと1個しかないわけです。それじゃクレーンを作るのは難しい。
だから、ベルトコンベアを回したり、アームを回したりと1個のモーターだけでできる仕組みをそれぞれ工夫して箸を置いています。
 荷台に積んでおいた箸を押し出して置くロボットも(「たこりん号」梶原太陽さん)
荷台に積んでおいた箸を押し出して置くロボットも(「たこりん号」梶原太陽さん)
これ、ちょっと不思議じゃないですか?モーターって回ることしかできないのに、なんでこんな「押し出す」動き(往復運動)ができるんでしょう?
実は、こうなっています。
 モーターのシャフトに巻かれた片面ダンボールと、押し出す棒に貼られた片面ダンボールの凹凸が噛み合っているので、回転を往復に変えられるというわけ
モーターのシャフトに巻かれた片面ダンボールと、押し出す棒に貼られた片面ダンボールの凹凸が噛み合っているので、回転を往復に変えられるというわけ
機構としてはDVDドライブのトレイ等でも使われているものですが、それをダンボールで作っちゃったのがすごい!
小学生ロボコンはモーター以外の部品も、紙や竹ひご、発泡スチロールなど「工作っぽい」部品に限定されています。ギアや金属部品は使えません。でもロボコニストたちはそういった小学生らしい部品を使って、ロボットに驚くほどいろんな機能を搭載しています。これが本当にすごくて、個人的には小学生ロボコンのいちばん驚異的なところってここだと思っています。
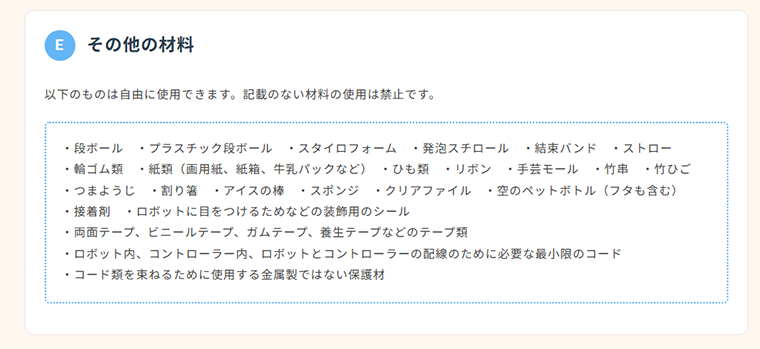 公式ルールより。使っていいのはこれだけ!!!(モーターや電気系の部品、タイヤは別項)
公式ルールより。使っていいのはこれだけ!!!(モーターや電気系の部品、タイヤは別項)
 これも往復運動での押し出し系ですが、別の実装。棒で動きを伝えるクランクというしくみを使っています。(「イタバネくん(クリスマスver.)」鈴木一矢さん)
これも往復運動での押し出し系ですが、別の実装。棒で動きを伝えるクランクというしくみを使っています。(「イタバネくん(クリスマスver.)」鈴木一矢さん)
こっちも仕組みとしては近いものだけど、箸を押し出した瞬間に機体の後ろからバックファイヤが出るようになっているのが面白い(「G-LINE」山本桜大)
 このロボットはコップをつかむ機能と箸を置く機能をひとつのくちばしで兼ねています。するとモーターが節約できるので、後ろにももう一つ同じ装置を積んでいて、前後ダブルで作業できます。(「がんばれペン太くん」満重結仁さん)
このロボットはコップをつかむ機能と箸を置く機能をひとつのくちばしで兼ねています。するとモーターが節約できるので、後ろにももう一つ同じ装置を積んでいて、前後ダブルで作業できます。(「がんばれペン太くん」満重結仁さん)
ダブルで仕事ができるということは作業速度は上がりますが、そのぶん操作が難しくなるよな……と思ったら自由自在にスイスイ動いていました。制作技術だけではない、運転技術のほうにも相当な訓練を感じました。
 上下から挟み込んでいた箸を離して置くというパターンも。上と下で2つのモーターを使うリッチな機構ですが、上のアームは紙コップの保持も兼ねているのでモーター不足にはなりません。考えたなー!(「にゃん丸2号」小窪大智さん)
上下から挟み込んでいた箸を離して置くというパターンも。上と下で2つのモーターを使うリッチな機構ですが、上のアームは紙コップの保持も兼ねているのでモーター不足にはなりません。考えたなー!(「にゃん丸2号」小窪大智さん)
こうして見ると、「箸を置く」という動作ひとつとってもそれぞれ個性豊かで、そのすべてが工夫の塊です。
しかもそれが、箸を置くところだけじゃないですからね。コップを運ぶ、機体の移動などなど、全ての機能にこういったアイデアや工夫がふんだんに盛り込まれていて、それを形にする実装力も圧倒的。
そろそろ皆さん忘れかけてると思いますが、これ全部小学生が作ってますからね!?
仕組みがわかるおもしろさ
さきほど、全部の機能がモーターの回転で作られているとご説明しましたよね。
次は、これをどうやって操作してるかも見ていただきましょうか。
 コントローラーも自作!
コントローラーも自作!
ぐぐぐっとズームしてみましょう。
 板にレバーが4本貼ってあるだけ!
板にレバーが4本貼ってあるだけ!
これ、各モーターの回転&逆回転のレバーです。
なにしろ複雑な電子回路など一切使っていないので、操作は素朴に「モーターを回す」だけなんですね。「箸を置くボタン」を押すと置ける、みたいなのじゃないんです。モーターを直に回す。すごいシンプル。
このロボットたち、一般的に「ロボット」と聞いて想像するものよりずっとシンプルなんです。プログラミングも使っていません。学校の理科で習う範囲の電気回路と小学生らしい材料で、ぱっと見はわりと「工作」って感じなんですよ。
それなのに驚くほど自由自在に動いて、多機能で、そして正確。動いてるものを見るとマジでロボットなんです。これを工夫とアイデアと作り込みだけで実装しているというのがほんとうにすごい。
また観戦のポイントとして、ロボットがシンプルなだけに、動いてるのを見たら素人でもなんとなく仕組みがわかるというのも面白い。これも高専や大学のロボコンにはない、小学生ロボコンならではの魅力だと思います。
競技「グレート・ビッグ・ブリッジ」とは
ロボットの細かい話でアツくなってしまいましたが、今さらながら今回のルールの説明をしていきたいと思います。
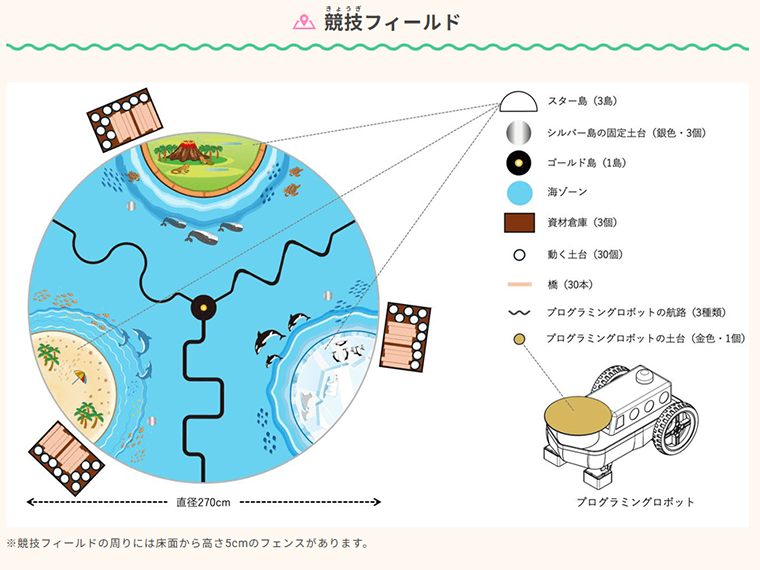
公式ルールより、競技フィールド
この円形のフィールドの中にできるだけ長い橋をかけるのが目的です。橋が長いほど高得点。
くわえて、「スター島」と書かれた3つの島がありますよね?そのスター島と、わきにある小さなシルバー島、および真ん中のゴールド島をつなぐと、それぞれボーナス得点があります。このボーナスはとても大きいので、ぜひ狙っていきたいところ。
競技の進め方はこうです。
まず最初に、説明の右下に描かれているプログラミングロボットをフィールドの端から出発させます。これは先ほど紹介した自作のロボット達とは別で、全チーム共通で支給される全自動のロボット。改造は不可で、制御プログラムだけを書き換えることができます。
 フィールドの端からスタート
フィールドの端からスタート
 黒い線をなぞってゴールに着くようなプログラムにする必要がある
黒い線をなぞってゴールに着くようなプログラムにする必要がある
このプログラミングロボットもそれだけで記事1本くらい書ける奥深さがあるのですが、当日は全チームきれいにゴールしちゃったのでここでは割愛します。小学生ロボコニストたちの実力、容赦なし。
そのあとロボットのセッティングタイムののち、いよいよ競技開始。
まずはメンバー3人それぞれのロボットが、順番に1分ずつ、ソロで橋を作っていきます。
 ロボットは「スター島」から資材を持って出発。この間、他のロボットは動いてはいけません。またロボットが自分のエリア(フィールドの三分の一の範囲)から出ることもNG
ロボットは「スター島」から資材を持って出発。この間、他のロボットは動いてはいけません。またロボットが自分のエリア(フィールドの三分の一の範囲)から出ることもNG
そして3台分それぞれの単独作業の時間が終わったら、後半1分30秒を使って3台の協力プレイで橋を仕上げていきます。
 3台ともフィールド全体を自由に動けますが、すでに橋がある程度組まれているので、より慎重な操作とチームワークが要求されます
3台ともフィールド全体を自由に動けますが、すでに橋がある程度組まれているので、より慎重な操作とチームワークが要求されます
制限時間いっぱいまで橋を架け、ブザーが鳴ったらチャレンジ終了、といった流れ。
評価はポイント制で、橋の長さ+島を繋いだボーナスによる最大500点の競技得点にくわえ、アイデア得点として最大500点が審査員によって加点されます。
では実際の競技の様子を見てみましょう。個人的に印象に残った2チームについて、ご紹介したいと思います。
唯一無二の作戦と協力プレイ「海線勝丼JAPAN」
まず紹介したいのが、チーム「海線勝丼JAPAN」の1ラウンド目のプレイ。
ここは戦略の独特さが目立ったチームです。
まずは前半のソロ作業パートから。
 1台目は「がんばれペン太くん」(満重結仁さん)。小回りの良さを活かした立ち回り。
1台目は「がんばれペン太くん」(満重結仁さん)。小回りの良さを活かした立ち回り。
頭側とお尻側にダブルでアームがあるので、ときに両方でコップを2個抱えながら、スピーディーにコップを並べていきます。
 この子、性能も高いのですが、なんか表情があってかわいいんですよね
この子、性能も高いのですが、なんか表情があってかわいいんですよね
そして二番手は「カブリッジ」(後藤光成さん)。

カブトムシ型のロボット。T字型の角で、コップを4個抱え込める
この角は動かないので、コップをしっかりグリップしたりはできません。ただ、T字型の形状と、先端にコップをひっかけられる突起がついていることで、想像以上に自由自在にコップを操ることができます。
 「4つ持っているうちの1つだけここに置いていこう」みたいなことが、ほら、できちゃう!
「4つ持っているうちの1つだけここに置いていこう」みたいなことが、ほら、できちゃう!
モーターを使わず、形状の工夫だけでここまでできるのは本当にすごいです。
で、ここまででこのチームの独特の作戦が少し見えてきます。実は最初の2台、コップを並べただけで、ほとんど橋をかけてないんですよね。
3台目の「シーラカンスくん(秋田燈史朗さん)」のマシンが登場し、いよいよ橋を架け始めます。
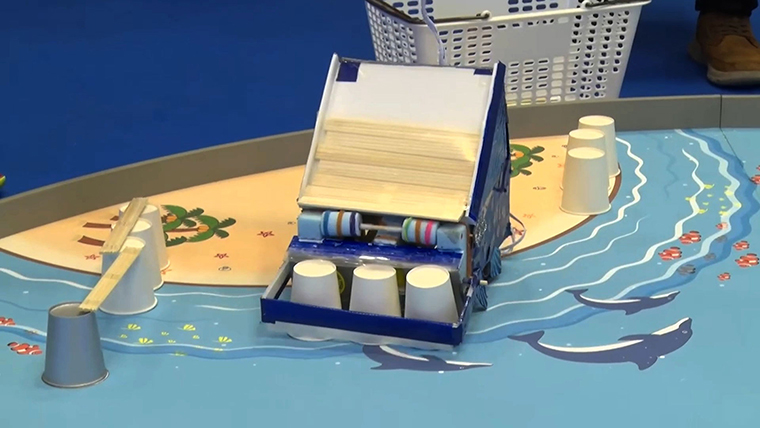 コップを3つホールドして運んだ後…
コップを3つホールドして運んだ後…
 機体上部の斜面にストックした割り箸を、1本落として橋を架ける
機体上部の斜面にストックした割り箸を、1本落として橋を架ける
ところが、ここでトラブル発生!割り箸が橋として認められるには、必ず両端がコップに接している必要があります。つまり箸が重なるとNG。
上の写真の状態だと手前側が隣の割り箸の上に乗ってしまっているので、得点にならないんですね。こんなときどうするかというと…
 直した!!!
直した!!!
なんと、コップをホールドするためのコの字型のアームで箸をひっかけ、見事に微調整しました!
ここまで想定されているのは抜かりなさすぎる……。
そうこうしているうちに前半パートが終了。
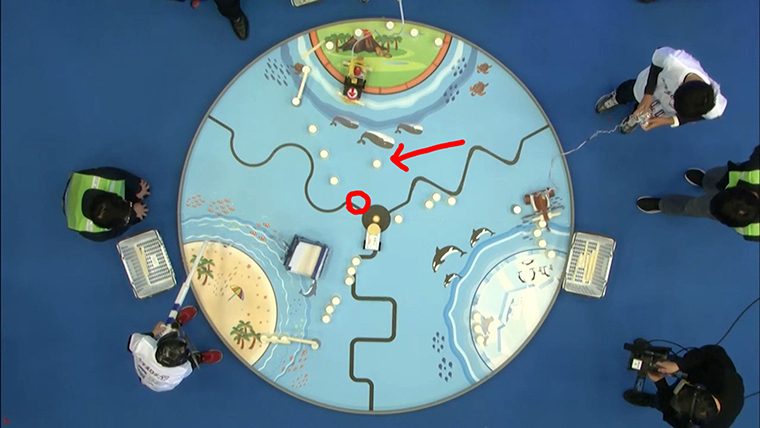 3つのスター島と、真ん中のゴールド島および脇にあるシルバー島を結ぶ軌跡におおむねコップを並べ終わりました
3つのスター島と、真ん中のゴールド島および脇にあるシルバー島を結ぶ軌跡におおむねコップを並べ終わりました
ここで注目しておいてほしいのが、赤で矢印をつけたコップ。これ、効率的に橋を架けるなら赤丸のあたりにいた方がいいはずなんですよ。ただ、これはきっと「あえて」の作戦だと思います。その意味は後半の協力プレイで明らかになるでしょう。
そしていよいよ後半。
後半で最重要となるのが、真ん中のゴールド島にかける橋。ここは各スター島からの3本の橋の連結点となるため、うまく三叉路を作ることができれば橋の長さが一気に稼げます。さらにゴールド島とスター島がつながることで大量のボーナス得点もゲットできる。
というわけでさっそく橋をかけに、ペンギンとシーラカンス、2台のロボットがやってきました。
 矢印はロボットの移動ルートです
矢印はロボットの移動ルートです
ここでペンギンに注目。
これまでペンギンがかけていた橋は上のスター島からの橋なので、普通に考えたら赤点部分にコップを置いて、そこにゴールド島から橋を架けるはずなんですよ。
でもここではカブトムシがかけている右からの橋のサポートに回っている。この協力プレイが、このチームの見事なところなんです。そして前半でさっき赤丸で囲った場所にコップを置いていなかったのも、カブトムシ側のエリアまで侵入していく際に、コップが邪魔にならないようにしていたのではないかと思います。
 そんな協力プレイで着々と橋を延ばしていき…
そんな協力プレイで着々と橋を延ばしていき…
 最終的にはこんなに長い橋に
最終的にはこんなに長い橋に
ゴールド島からの三叉路も完成し、大きな橋になりました!!!
得点は一番長い橋にのみ与えられるので、左上につながっていない橋があるのは少し惜しいところ。しかしそれでも大きな橋ですし。
というわけで、競技得点は260点の高得点を叩き出しました!
 ちょっと話がそれるのですが、重なった割り箸の微調整についてはこのロボットもすごかった。目のパーツの下、結束バンドのしなやかさを活かして小さいアームを作り、箸を動かしています(「シャーク」齋藤有志さん)
ちょっと話がそれるのですが、重なった割り箸の微調整についてはこのロボットもすごかった。目のパーツの下、結束バンドのしなやかさを活かして小さいアームを作り、箸を動かしています(「シャーク」齋藤有志さん)
 さらにこっちは別の手法。新しい箸を置く前に、機体左正面についたつまようじで設置済みの箸を押すことで、重ならないようにしています。重なってから直すのではなく、事前に調整するというアプローチ。ほんとロボットの工夫については無限に紹介したいところがある…!(「KAKERON」酒井かのん さん)
さらにこっちは別の手法。新しい箸を置く前に、機体左正面についたつまようじで設置済みの箸を押すことで、重ならないようにしています。重なってから直すのではなく、事前に調整するというアプローチ。ほんとロボットの工夫については無限に紹介したいところがある…!(「KAKERON」酒井かのん さん)
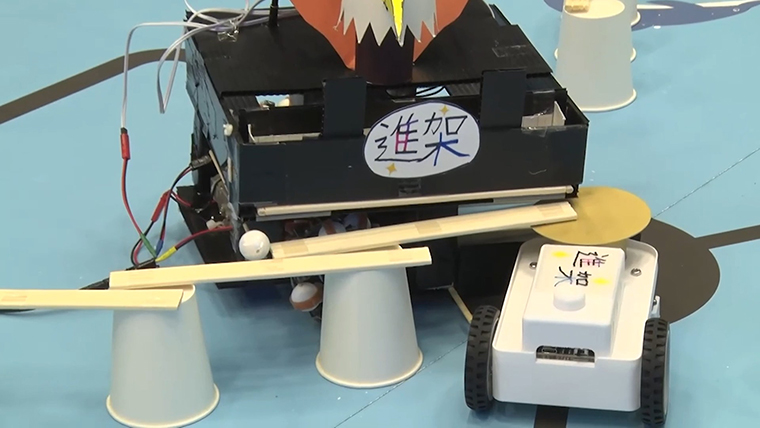
圧倒的安定感「THK進架」
続いてもう1チーム。「THK進架」の2ラウンド目のプレイを見てみましょう。
まずはソロパートから。
 一機目のロボットは「クワガタ建設株式会社 建設用ロボット クワちゃん」(本多功奈さん)。前後に合計8つのコップを保持可能。
一機目のロボットは「クワガタ建設株式会社 建設用ロボット クワちゃん」(本多功奈さん)。前後に合計8つのコップを保持可能。
このロボットの安定感がすごいんですよ、また。
 迷いもブレも一切なしに、あたりまえのようにコップを並べ、橋をかけていく。
迷いもブレも一切なしに、あたりまえのようにコップを並べ、橋をかけていく。
でね、その次のロボットもまた尋常じゃないんです。
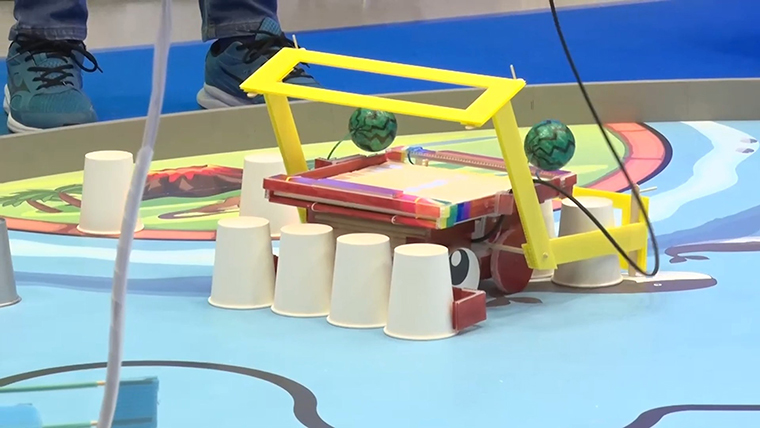
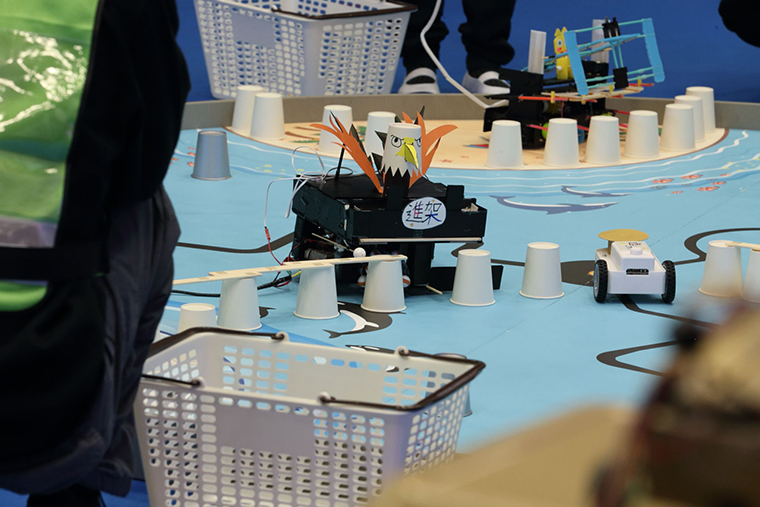 「架けワシ」(津田樹希さん)。黒いワシのロボットです
「架けワシ」(津田樹希さん)。黒いワシのロボットです
なにがすごいって、このロボット、方向転換しないで横に動けるんですよ。
 前進→ちょっと左に動いて、つぎ右に行ってるのわかります?
前進→ちょっと左に動いて、つぎ右に行ってるのわかります?
これ、普通のタイヤ使ってたらこんなことできないですよね。自動車も自転車も、真横に進める製品なんて見たことないじゃないですか。でもこのロボットはできる。仕組みはどうなってるかというと……
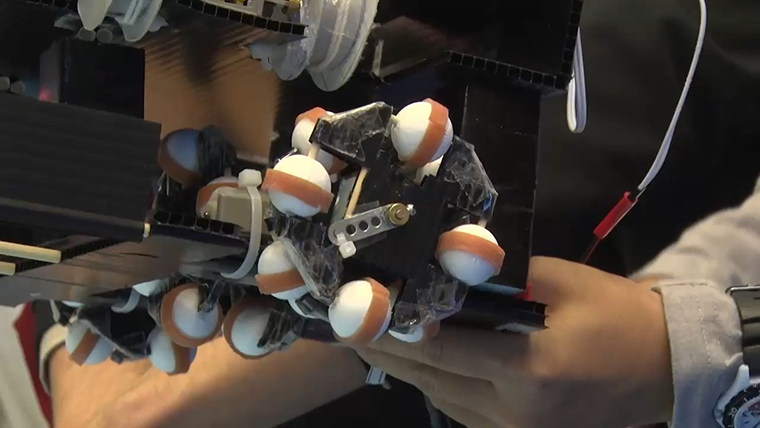 車輪がこうなってます
車輪がこうなってます
これ、オムニホイールといって、タイヤにさらに小さなタイヤがついていて、横方向に空転できるようになっているんです。これをH型に3つ配置することで、前後左右に方向転換なしで動けるようになっています。すご。
オムニホイール自体は彼の発明というわけではなく世の中にすでにあるモノではあるのですが、それをプラダンと発泡スチロール、そして輪ゴムで自作しちゃおうと思ったのがすごい。思ったのもすごいし、実際に形にしてしまったのもすごい。
これでスイスイと橋をかけていきました。
そして3台目。さっきも登場したこのロボットは、「にゃん丸2号」(小窪大智さん)。
 上下から挟み込んで箸を運ぶ。
上下から挟み込んで箸を運ぶ。
さっき、「このロボットは箸を運ぶのにモーターを2つ使って上下から挟み込んでるんです」という説明をしました。一見、非効率なこの運び方には理由があるんです。
 単に乗せるのではなく挟むことで、本体からはみ出させて2本の箸を持てます
単に乗せるのではなく挟むことで、本体からはみ出させて2本の箸を持てます
箸をしっかりホールドすることで2本つなげた状態で持つことができます。これにより、1回置くだけで長い橋をかけることができるんですね。
なんなんだこのチームの多才ぶりは。
 前半終了時点でもう、3つのスター島からそれぞれ長い橋ができつつあります。
前半終了時点でもう、3つのスター島からそれぞれ長い橋ができつつあります。
あとはこの3本の橋を、連結点であるゴールド島でうまく接続できれば、というところですが……
ワシが1本かけ

クワガタが順調に2本目
 最後、ネコが土台のコップごと持ってきて3本目を設置
最後、ネコが土台のコップごと持ってきて3本目を設置
 こうしてフィールド上に、真ん中でつながった3つの「7」、スリーセブンが完成!!!
こうしてフィールド上に、真ん中でつながった3つの「7」、スリーセブンが完成!!!
なんと、全てのコップを使い、全ての島を完全につなげた巨大な橋を完成させました。競技点数は、満点の500点!
しかもこのチーム、驚くべきことに、1ラウンド目にも満点をたたき出してるんですよ。つまり理論上の最高得点を獲得。恐ろしい安定感……。
三冠受賞者、誕生
そんなこんなで全競技が終わり、結果発表。
両ラウンドで満点をたたき出したTHK進架が、小学生ロボコン大賞のチーム部門を受賞しました。
 特別審査員、八谷和彦さんとの記念ショット。これ以上ない納得感の受賞でした
特別審査員、八谷和彦さんとの記念ショット。これ以上ない納得感の受賞でした
そして同チームのメンバー、オムニホイールのロボットをつくった津田樹希さんが、小学生ロボコン大賞の個人部門、およびロボコニスト同士の推薦で決まる賞「MVR」もダブル受賞。つまり三冠です。
 オムニホイールのみならず、箸の射出と連動してワシが羽ばたくギミックがあったりと、とにかく作り込みがすごい。
オムニホイールのみならず、箸の射出と連動してワシが羽ばたくギミックがあったりと、とにかく作り込みがすごい。
総合的な作り込みとアイデアの豊富さで、輝くべくして輝いた三冠だったと思います…!
さてさて、そんな授賞式ですが、みなさん、私が冒頭で書いたことを覚えてますか?
小学生ロボコンのオープニングの醍醐味は、「小学生のワチャワチャ感」でした。そして表彰~閉会のあいだも、第二次ワチャワチャタイムなんです。
 イベントもクライマックスのそのとき
イベントもクライマックスのそのとき
司会のお二人が大会を締めくくろうとしているその瞬間に、後ろでは……
・前の子の頭を後ろからぐしゃぐしゃにする子
・もらったメダルをかじる子
・前の子の首に風を送ってちょっかいを出す子
・あくびをする子
・メダルの紐をねじってクルクル回して遊ぶ子
などなど、競技が終わって緊張の解けた小学生たちによるワチャワチャが存分に繰り広げられていました。
小学生ロボコンとは、普通にすごいロボコンと小学生のワチャワチャを同時に堪能できる、本当に稀有なイベントなのです!
激エモエピソードも
最後に、本大会で個人的に最も印象に残った激エモエピソードを紹介して記事を締めくくりたいと思います。
2ラウンド目、競技後のインタビュータイムに、THK進架チームの本多さんが使っていたコントローラーに話が及びました。
 この長いのがコントローラー
この長いのがコントローラー
配線がたるんでコップやロボットを巻き込まないためにコントローラーは長くするのが定番なのですが、みんながダンボールやら木材やらを素材にして伸ばす中、異彩を放っていたのがこのコントローラー。
なんだか素材が派手なんですね。
途中で司会の花守さんが見破ったのですが、これ、本大会の予選会で使った競技フィールドを細長く丸めたものらしいんです。
「こんな見るも無残な姿に!」と突っ込む花守さんに対して、本多さんは笑いながらこう答えました。
「予選のときにも何百回も練習したフィールドを、本番に連れて行ってあげたかったんです。」
えっ、なにその泣ける返し……!?
即座に「私が愚かでした。本当に申し訳ない」と反省する花守さんにウケつつも、私は私で、一人一人のロボコニストたちがどれだけの想いを抱えてこの場に来ているのか、思い知ったような気がしました。
これは完全に余談なんですけど、そんな光景を見ているとなんだか胸がいっぱいになってしまって、帰りは自分の子供たちにケーキを買って帰りました。彼らはロボコン全然関係ないんですけどね。感動のやり場がなくて。会場での胸アツを家庭に還元してしまいました。
というわけで、アツくてすごくてワチャワチャしている、とにかくいろんな魅力を持った大会。それが、小学生ロボコンでした。いやもうほんと良かった…。
ライター:石川大樹
「技術力の低い人 限定ロボコン(通称:ヘボコン)」主催者、雑な電子工作作家。共著書に初心者向け電子工作本「雑に作る」(共著、オライリー・ジャパン)。
本業は編集者・ライター。よみものサイト「デイリーポータルZ」などで編集を担当。趣味はワールドミュージック収集です。











 ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり