2023年の「アイデア対決・全国高等専門学校ロボットコンテスト」(以下、高専ロボコン)の競技テーマは「もぎもぎ! フルーツGOラウンド」。段差とロープの障害物をクリアし、高さの異なるフルーツを収穫して、高得点を競いあうルールだ。数ある強豪が出場する全国大会のなかでも、国立東京工業高等専門学校(以下、東京高専)は、1988年に開催された「アイデア対決・独創コンテスト」(第1回NHKロボコン大会)から出場してきた伝統校だ。特に同校は、細部にわたり洗練されたデザインのロボットづくりに定評があり、今回のロボットもピカっと光るものがあった。同校のメンバーと顧問の先生に、どのような方針で完成度の高いロボットに仕上げてきたのか、その秘訣や日頃の努力などについて話をうかがった。
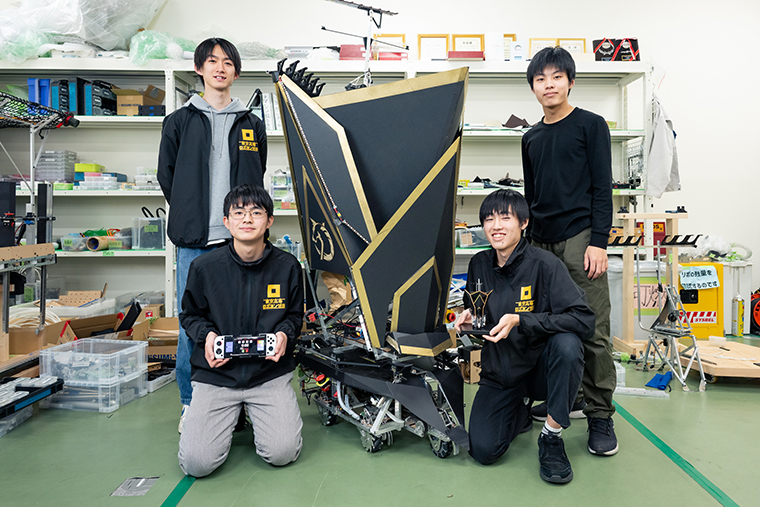
東京工業専門高等学校 SφPNIR(スレイプニル)チーム 主要メンバーのみなさん。
ゼミの一環として編成されている東京高専のロボコンチームの強み
取材して初めてわかったことだが、東京高専のロボコンチームは、有志やロボット研究会といったクラブ活動ではなく、ゼミの一環として実施しているとのことで、顧問の先生もしっかりと指導されているようだ。毎年、総勢40名以上の学生がゼミに参加しており、取材時にも関東春ロボコンという新人ロボコン大会に向けて1年生(新2年生)がロボットの製作に勤しんでいた。もちろん学生さんが中心となってロボットを製作していくことに変わりはないのだが、こういったゼミ活動を通じて協力し合いながら完成度の高いロボットができているようだった。
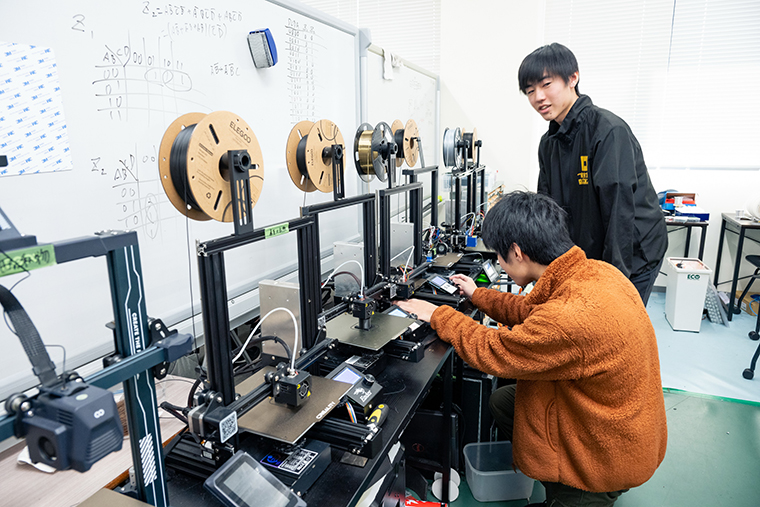
ゼミ室にずらりと並ぶ3Dプリンターに驚いた。ゼミ所有のものは2台だけだが、それ以外のプリンターはゼミ生が持ち込んだ私物というから凄い。
別の工作部屋にあるCNCフライス盤でロボットの金属フレームなどを加工するという。こちらのフライス盤は先輩が自作でCNC化したそうだ。
ロボットの製作には、機構設計、電気・電子回路、センサ、制御、プログラミングなど、さまざまな技術が必要になり、いわば演劇などの「総合芸術」のような要素が求められる。これらの要素技術をバランスよくインテグレートして初めて完成度の高いロボットになると言えるだろう。特に設計にあたっては、機械系と電気電子・制御系の担当者が互いにコミュニケーションを取り合いながら、うまく折り合いをつけて、プロジェクトを進めていくことが肝要だ。
この点について、東京高専のBチームリーダーで、新4年生になる明石さんは「まず課題の中で一番難しいロープのすり抜けからアイデアを出し合って、次に段差の乗り越え、駆動系というように検討しながら、全体設計に取り組みました。脚回りも最初は2つの大車輪と補助輪を使うまったく異なる形でしたが、試行錯誤を繰り返していくなかで、現在のデザインに収斂していきました」と振り返る。
ロボットの全体設計については、当初はAチームとBチームに分けず、基本コンセプトを全員で考えたそうだ。アイデアを出し合う中で、自分たちが参加したいチームを選んで編成したという。「これはゼミ生の自主性に任せたほうが、やる気もモチベーションも出るだろうという判断からです。ただしチーム編成が、機械系と制御系の得意なメンバーに偏ってしまった点は反省点ですね」と明石さん。
なぜ今回の競技が難しい? ロボット設計の観点から垣間見られる手ごわさ
さて、東京高専の具体的な紹介に入る前に、今回の競技ルールから考慮すべき設計ポイントについて見ていこう。この競技は、冒頭で触れたとおり、段差とロープの障害物をクリアし、高さの異なるフルーツを収穫するというもの。これだけ聞くと、それほど難易度が高くない競技のように聞こえるかもしれない。しかし全体的にみると大変よく練られた(実に意地の悪い)課題なのだ。
まず障害物のロープ越えが非常に難しいことが挙げられる。次にフルーツの収穫も意外と大変だ。ロボットは外周(1周目)と内周(2周目)を回ることになっており、各コースに設置されたフルーツの高さがバラバラで、フルーツを採りづらいからだ。高得点を狙うには、1周目に置かれたフルーツを迅速かつ着実に採ったうえで、いち早く2周目のセンターゾーンに辿り着いて、そこにある2m以上の高所のフルーツを狙わなければならない。
ここで各チームで考案したおたすけアイテムを使うことになる。このアイテム自体はロボットが一周目を終えてスタート地点に戻ったときにロボット側に装着することになるため、2周目からが実質上の戦いと言ってよいだろう。ここで高得点のフルーツをいかに多く採れたかによって勝負が決まる。おたすけアイテムが重要なパーツになり、その機構も頭のひねりどころになるわけだ。
センターゾーンに入ってフルーツを取る東京高専のSφPNIRの様子。長く伸びる丸い竿のようなおたすけアイテムを展開する。
そもそも2周目のセンターゾーンに早く到着するには、1周目の障害物をいかに早くクリアしていくかということが重要だ。障害物には段差とロープがあるが、ロープをクリアするためには、ロボットの車高を抑えた低重心設計とし、そのままロープ下を潜り抜けるロボットを作るチームが多かった。そのほうが速度を落とさずに、そのまま走れるし、機体設計も比較的シンプルになるからだ。
ただ車高を低いロボットにすると、今度は高い位置にあるフルーツへのアクセスが大変になってしまう。そこで最初から車高を高く設計するという選択肢も出てくる。そうなると面倒な点が、いかにロープをクリアするかということだ。アイデアとして思いつくのは、ロボットに脚や特殊なリムレスホイールを付けてロープを跨ぐ方法か、ロボット内部にロープを貫通させてすり抜けるという方法だ。いずれも機構が複雑になるが、これも高専生の腕の見せ所になるところだ。
何事もないように機体の内部へロープがすり抜けていく東京高専のSφPNIR。非常にスムーズにクリアしていく点が素晴らしい。
また、もう1つの障害物の段差越えは、ロープよりも難易度は高くないものの、やはり慎重な設計が求められる。まず駆動系には大きな車輪とハイパワーのモータを採用して勢いよく乗り越えていくことが大切だが、これは低重心・低車高のロボットに向く方法だ。車高が高いロボットでは重心も高くなるため、段差を超えるときの傾き具合によっては、バランスを崩してロボット自体が転倒してしまいかねない。そこで高速走行する車輪に加えて、走破性に優れたクローラを採用するチームも見られた。
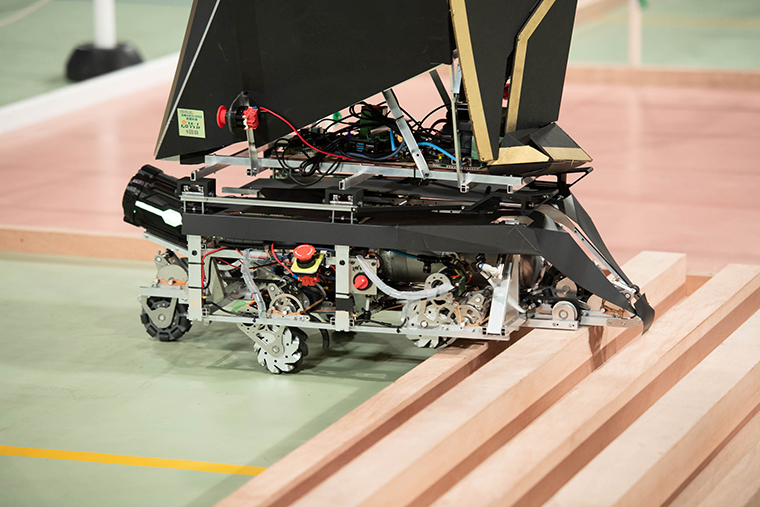
東京高専のSφPNIRの段差乗り越えの様子。こちらも何事もないように機体を水平に保ちながらクリアしていくが、車輪走行とクローラを採用している。
メカ設計のポイントその1~自動的にロープを内部に貫通させる機構
このように今回の競技課題を上手くクリアするためには、互いに相反するような要素をロボットに盛り込んで、いかにバランス良く設計していくかという点が重要になる。これらを踏まえたうえで、東京高専のSφPNIRを見ていくと、いかに完成度が高いロボットであるかということも頷けるだろう。
VIDEO
障害物で一番難しいロープについて、SφPNIRはロボット内部にロープを貫通させる方式を採用している。このロープのすり抜け方が他校に比べてスムーズで、ロープが存在しないような感じで高速でクリアできる点が凄いところだ。ロ-プを貫通させるためには、物理的にロボットを上下に分離し、その間からロープを通していかなければならない。
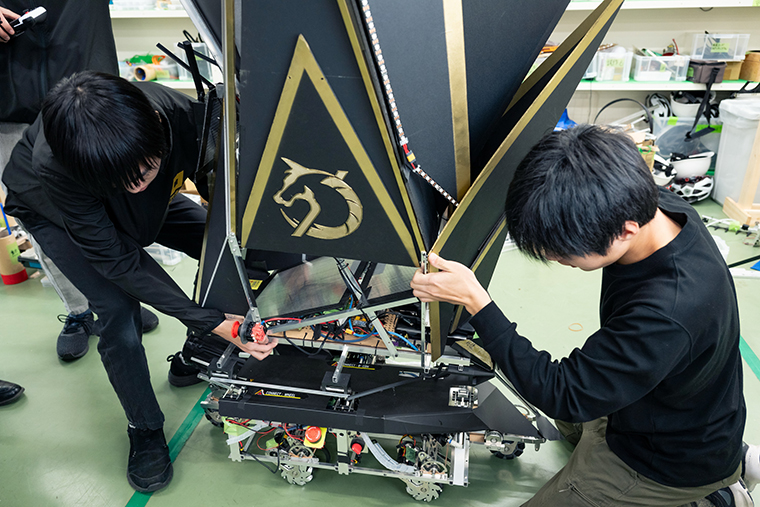
上下に分離されたロボットの機体をはめているところ。ロープは上下の機体の隙間を縫ってすり抜けていくことになる。
ただしロープを通すときは、上下の部分のどこかで必ず連結されていなければ、ロボット自体がバラバラになってしまう。そこでSφPNIRでは、上下に分離された機体は普段は連結されており、ロープが機体に貫通するときだけ、連結部の一部が外されるという仕組みになっている(これは他のチームも同じ仕組み)。具体的には前後と中央の両脇に2ヵ所×3組の連結部があり、最初のロックだけコントローラ側から手動で解除する。
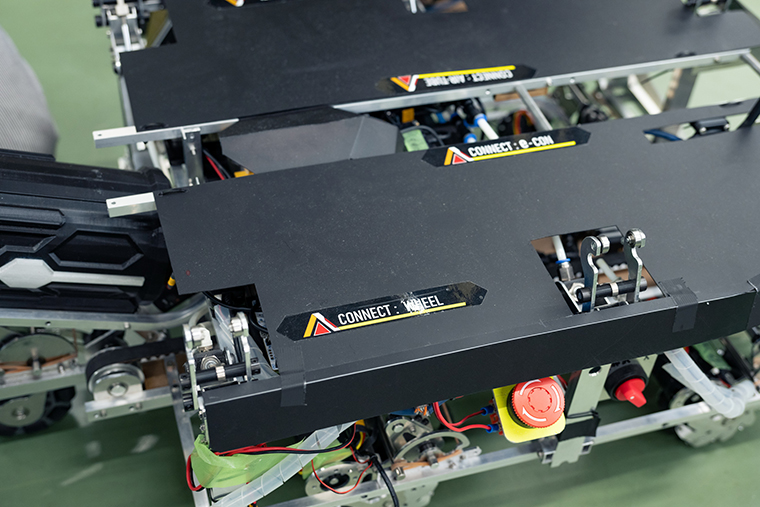
下部の機体を上から見たところ。天面に2対のロックが3組ずつ配置され、上下の機体の隙間にロープが入っていくときに順次ロックが外れる。
横にみえる棒状のものがメカニカルスイッチ。ここにロープが当たると、ロックが自動的に解除されるようになっている。
次の2ヵ所の連結部のほうは自動で開いてロープを通していく形だ。ロープをスムーズに通すために、タッチセンサとしてメカニカルスイッチが使われており、ロープを検知するとエアシリンダが働き、ロックを外しながらロープを内部に通していく。
VIDEO
ロボットの動きに応じてロープが内部に進んでロックが解除され、同時に前のロックが閉まる。さらに最後尾のロックが開いてロープを通し、前の中央ロックが閉じる形だ。ちなみにロックを解除するためのエア源となるボンベは、鉄製からアルミ製に変更し、容量も小さくして軽量化を図ったそうだ。
機構担当の柳井さんは「やはり1回に使うシリンダのエア量と動作回数とタンク容量のバランスが難しかったです。地区大会ではエアタンクが重くて重量制限ギリギリでした。そこで先輩がSMC製のストロークの小さなエアシリンダに選定し直し、圧縮空気の使用量を抑えることで、タンク自体も小型化しました」と、エア周りの工夫について教えてくれた。
エアシリンダでロックを解除する。圧縮された空気を貯めるタンクは、以前までは鉄製のものを採用していたが、本大会では軽量なアルミ製に変更。
メカ設計のポイントその2~何もないように通れる!? 洗練された段差越え
もう1つの障害である段差越えでは、大車輪を利用して勢いよく乗り越えていくチームが多かった。このスタイルは、機体に与える衝撃が強くなるため、メカの頑強さに加えて、電気・電子部品への影響やコネクタ類の篏合などにも注意する必要がある。
一方、東京高専の製作したSφPNIRが惚れ惚れする点は、まったく機体が傾くことなく、そのままの高さで、何もないように水平状態を保ちながらスルーできてしまうことだ。こちらもロープのすり抜けと同様に非常にスムーズな動きだ。この段差越えのアプローチは、他校には見られない方法であり、非常に洗練された設計という印象を受けた。
「最初の設計でロープのすり抜けが上手くいったので、それなら段差のほうもス—ッと何もないようにクリアできるようにしたらどうか? とゼミの先生にアドバイスをもらい、水平状態のまま通り抜けられる機構にチャレンジしました。ちょうど試験中に学校の折り畳イスをぼーっと眺めていたら、駆動輪を折り畳んでクローラで動かせば水平になるというアイデアが閃きました。それで試験中にもかかわらず、試作にとりかかりました」と柳井さんは笑いながら語る。
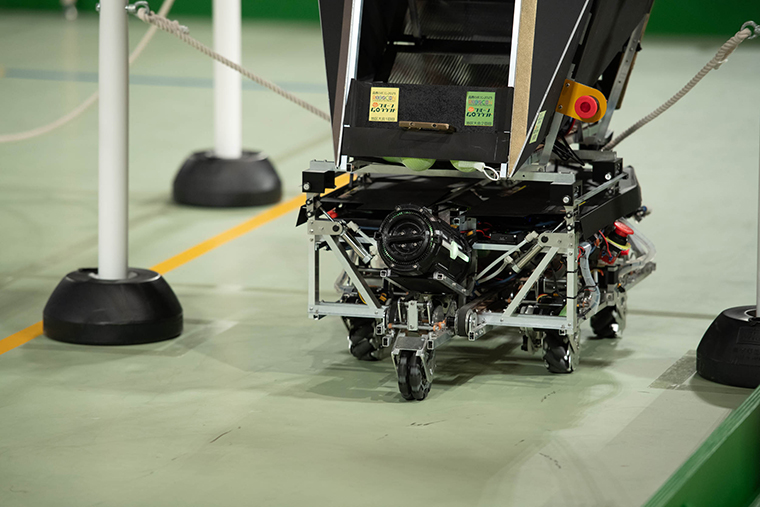
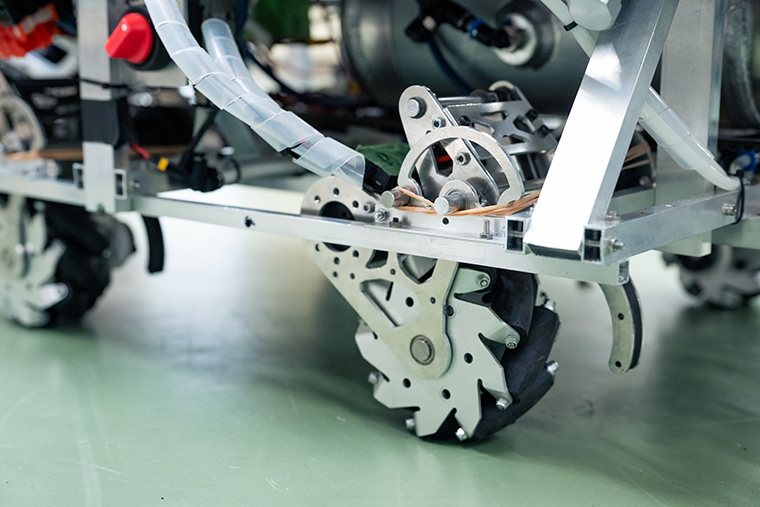
この段差越えのユニークな仕組みは、SφPNIRの脚回りに4輪のメカナムホイールと、前後に配置した補助輪のオムニホイール、さらにクローラの組み合わせによって生み出されるものだ
前から見た脚回り。前方にオムニホイールの補助輪があり、両サイドの4つの車輪には前後移動が効率に行えるメカナムホイールを採用。
メカナムホイールと、このホイールをリフトアップして機体に収納させる独自の角材乗り越え機構。機構担当の柳井さんが考案したものだ。
ポイントは、メカナムホイールに角材が当たるときに、4つの車輪が受動的にリフトアップされる工夫にある。そして車輪が機体に収納されると、ロボット下側に設置されているクローラの走行系にバトンタッチされ、段差の一番高い部分とクローラが接触して水平を保ちながら段差をクリアしていくのだ。
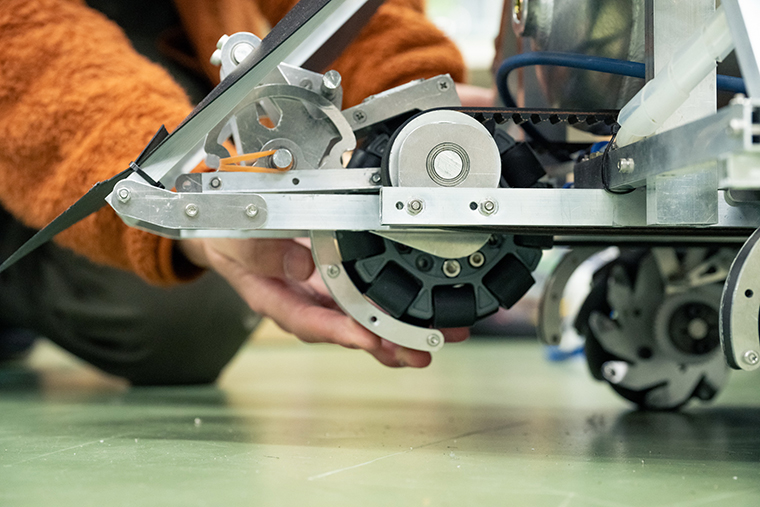
カバーに段差が当たると、その力で車輪が受動的に持ち上がり、段差から外れるとゴムの力でもとに戻るというしくみ。
車輪が持ち上ると同時に、機体の下側にあるクローラが働きだす。走破性に優れたクローラで面的に段差に接触。
ちなみに車輪が機体に収納されるカラクリは、電気的な要素を一切使わず、メカとゴムだけで収納できるようになっており、アイデアとしても秀逸だ。この機構は現在、特許出願中とのことだ。
VIDEO
このようにSφPNIRは、機能美と洗練されたデザインが大きな特長になっている。段差越えにしても、単に勢いに任せて力任せに突破するのではなく、振動や衝撃を機体に与えないような安全性とメンテナンス性への配慮もポイントになるところだろう。
おたすけアイテムとフルーツ回収機構の工夫と、拘り抜いたデザインの魅力
次にセンターゾ-ンに配置された高所のフルーツを採るおたすけアイテムをみていこう。このアイテムは、高さ調節が可能な丸棒によって、フルーツの位置を合わせられるようになっている。フルーツのS字フックに先端の丸棒を当てて傾けることでフルーツを落とす。このとき低位置にあるキウイフルーツを採る熊手状のツールがセンターゾーンで他のフルーツを採るときに邪魔にならないように収納するようにしたとのこと。またおたすけアイテムが伸びるため、機構の剛性を高めたり、重量を軽量化する工夫も凝らした。
VIDEO
おたすけアイテムも本大会に向けて改良した。約1ヵ月の期間でマンパワーが足りなかったため、先輩に手伝ってもらったという。
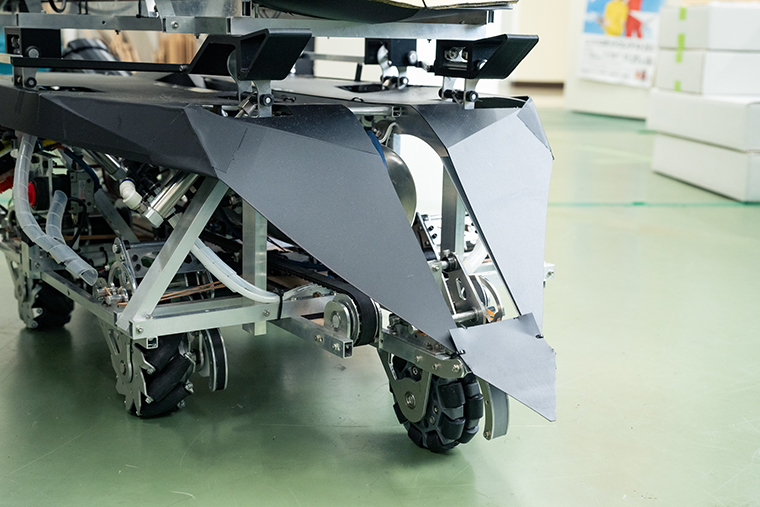
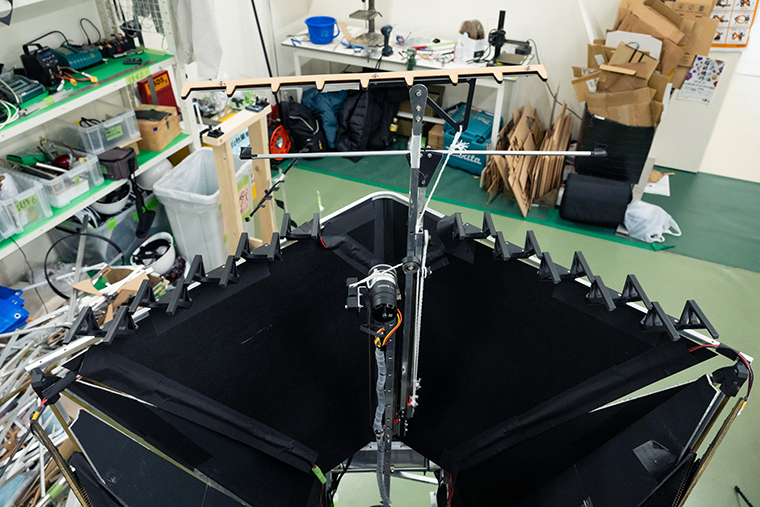
おたすけアイテムで落としたフルーツは、菱形の広い開口部で確実にキャッチして回収できるようになっている。回収部を菱形にデザインした理由は、脚回り前後で幅を取ってしまうため、サイズ制限ギリギリに伸ばして、安定化を図るための配慮だという。またトロフィのような外装を付けたり、内部にスロープをつけたりすることで、回収時の手間を省くようにしている。
おたすけアイテムと開口部の俯瞰。モータの回転でヒモを引っ張って熊手状のアイテムを倒して収納すると同時に、丸棒のアイテムを展開してフルーツを落とす。
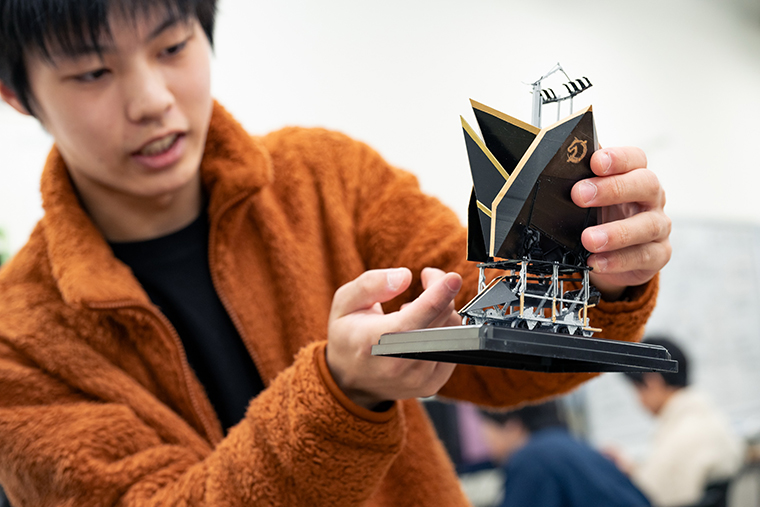
こういった機能面はもちろんのこと、SφPNIRの魅力は微に入り細にわたり手を抜かない拘りのデザイン性にもある。地区大会から本大会に向けて短期間に機体を改造したにもかかわらず、デザインに手を抜いていないのだ。もともとSφPNIRの由来は、北欧神話に登場する神獣・スレイプニルのことで、主神オーディンが騎乗する8本脚の軍馬だ。このロゴも自分たちで考えたそうだ。
樹脂製(ポリスチレン)の外装カバーのうえに金色のロゴを配した。「S」という文字と「φ」(レイ)の文字を合わせ、馬の顔に寄せている。
さらにカッコいいのが、ロボット後方に黒い突起部のバッテリホルダーがあり、そこにバッテリを充填して外フタを回すと、ロボットに魂が宿るようにLEDの光が回ったり走ったりするギミックがあることだ。
格好いいバッテリホルダー。黒い突起部にバッテリを装着し、フタを回すと電源がオンになり、ホルダー周りのLEDが点灯する。
VIDEO
「こういった凝ったデザインは東京高専の伝統です。これまで先輩がカッコいいロボットをつくってきたので、自分たちの代になっても負けないように、拘りながら設計しています」と柳井さんは語る。
機構部の設計を担当した柳井さんの説明。模型まで作って全体のデザインを検討したそうだ。東京高専の緻密さが良く理解できる一コマだ。
見えない部分でロボットを支える~電子・電気・制御系のポイントと工夫
ここからはSφPNIRの目に見えない部分についても見ていこう。今回のチームは電気電子・制御プログラミングのメンバーが一人しかいなかったため、その責任も大きかったようだ。担当の宮地さんは「ただ脚回りの基本的な仕組みは、先輩や他のメンバーがメカで制御できるように工夫してくれたので、だいぶ負担も減りました。ロープのすり抜けは、地区大会のときは手動でしたが、全国大会では自動で制御しました。プログラミングをする際には、ロックを解除するタイミングを決めることが難しかったです」と説明する。
つまりロボット自体の移動スピードが速すぎると、機体内部でロープが引っかかってしまうことがあるため、前出のように上下の機体のロックが外れてから、次にロックされるまでのタイミングを考慮しながら、うまくロープが抜けるように何度も調整したそうだ。
今回、駆動モータには小型で高出量なDCブラシレスモータ(エンコーダ内蔵)を採用している。モータ自体はDJI製なのでRoboMaster用のものと推測される。これには分散制御が可能な車載系のCAN(Controller Area Network)通信が使われている。コントローラは自作しており、スマートフォンを取り付けて、フルーツの種類ごとにコマンドを投げられるアプリなども搭載。アプリは別の部員が担当し、Unityで開発したそうだ。
スマートフォンとゲームコントローラを改造してロボットを操作。アプリの開発にはUnityを利用した。タイマー付きでオペレータの手元で競技時間がわかる。
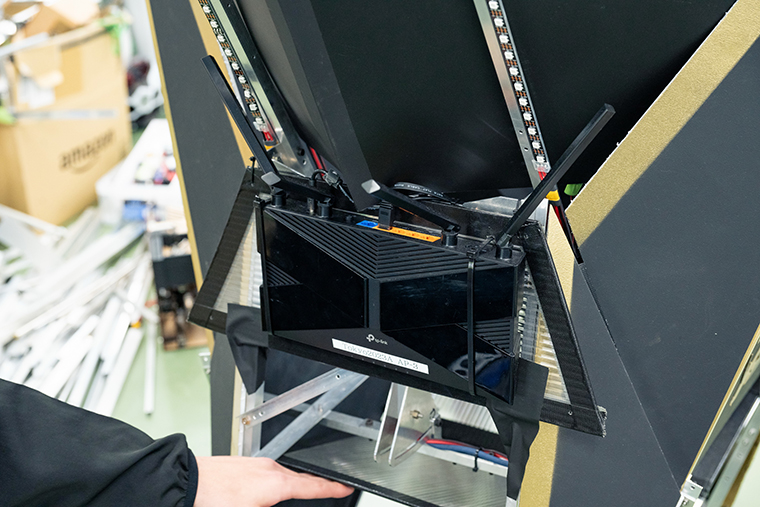
具体的な制御の流れは、スマートフォンからのコマンドを、ロボット側に取り付けられた2.4/5GHz帯のWiFiルータ経由でRaspberry Piのマイコンボードで受け取ってから、もう1つのSTMマイコンボードで処理したのち、モータの位置や速度を制御するデータなどを指令電圧としてモータドライバーボードに出す形だ。
自作のコントローラから、ロボット本体の背後にあるWiFiルータを経由して、制御ボードにデータを送るという流れ。
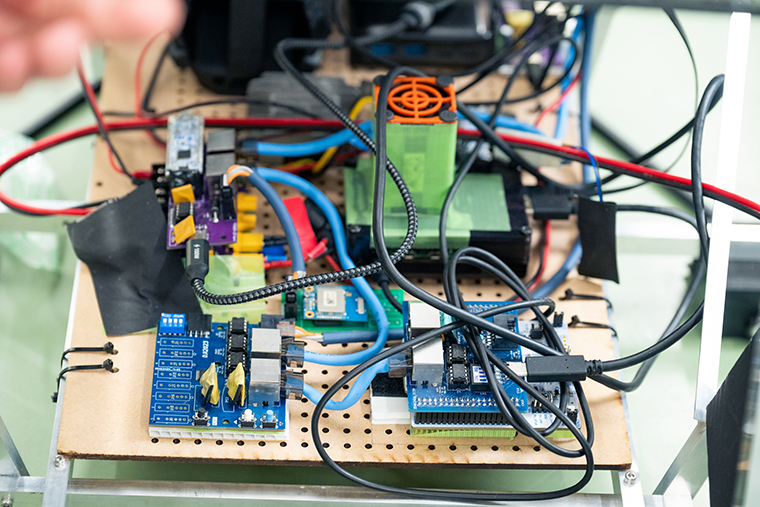
制御ボード類。Raspberry PiとSTMのマイコンボードで構成し、ドライバー回路でDCブラシレスモータを制御する。
高専ロボコンOBの顧問の熱血先生が語る! ロボット製作における教育的な効果
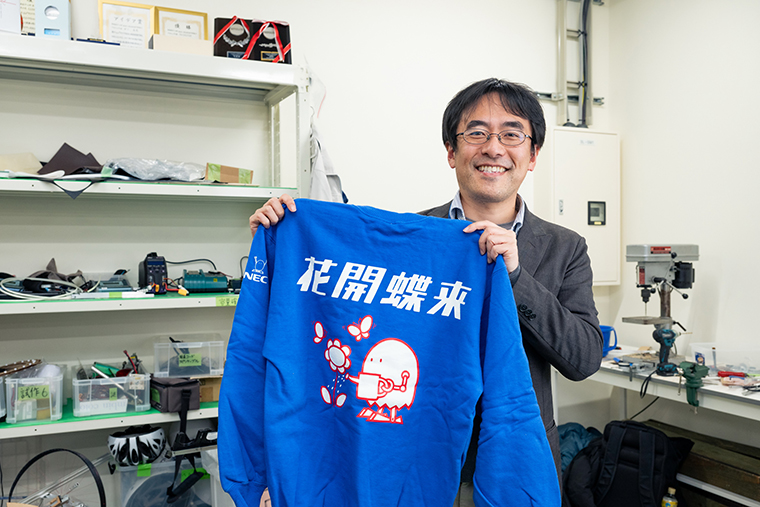
最後にゼミで学生らを指導している機械工学科 冨沢哲雄先生にも話をうかがった。実は冨沢先生も、かつて茨城高専時代に高専ロボコンに参加した経験があり、卒業後はいくつかの大学で教鞭をとっていたそうだ。しかし高専が大好きで、いまは東京高専で学生の指導・育成に当たっているという熱血先生だ。
顧問の冨沢哲雄先生は高専ロボコンのOB。かつて先生が出場した時代のユニフォームを披露してくれた。移動ロボットに公道で自律走行させる競技「つくばチャレンジ」の発起人の一人でもある。
冨沢先生は「大学の先生から高専の先生になると逆行しているように思われるかもしれませんが、高専では全国で毎年1万人もの学生を毎年世に送り出しており、高校に進学する人口の約1%を占めています。こういった若い学生たちと接して、実践的な人材に育てることにやりがいを感じて高専に戻ってきました」と熱く語る。
最後に、実際にロボコンに参加した過去の体験から、教育効果の高いロボコンの素晴らしさを身をもって知る冨沢先生の言葉で締めよう。
「高専ロボコンに参加すると技術的なサバイバル力が養われます。実社会に出て製品を開発するときは、なかなか失敗も許されませんが、やはりトラブルがつきものです。高専ロボコンでも、現場でトラブルが必ずと言ってよいほど発生するため、どこに問題が潜んでいるのかという対応能力が身につきます。高専ロボコンは失敗が許される世界なので、学生には本当にやりたいことを果敢にチャレンジしてもらいたいですね。たとえ上手く行かなくて悔し涙を流したとしても、それが将来的にプラスになって必ず自分に戻ってくるはずです」。
東京高専は1988年の第一回大会で初代の「アイデアだおれ賞」を受賞。そのトロフィが大事に保管されていた。先輩の背中を見ながら受け継がれてきた長い伝統が、素晴らしいモノづくりと教育に生かされている。
井上猛雄
産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、株式会社アスキー入社。「週刊アスキー」副編集長などを経て、2002年にフリーランスライターとして独立。おもにエンタープライズIT、ネットワーク、セキュリティ、ロボティクス、組込み分野などを中心に、Webや雑誌で記事を執筆。主な著書は、「災害とロボット」(オーム社)、「キカイはどこまで人の代わりができるか?」(SBクリエイティブ)など。





















 ものづくり
ものづくり ものづくり
ものづくり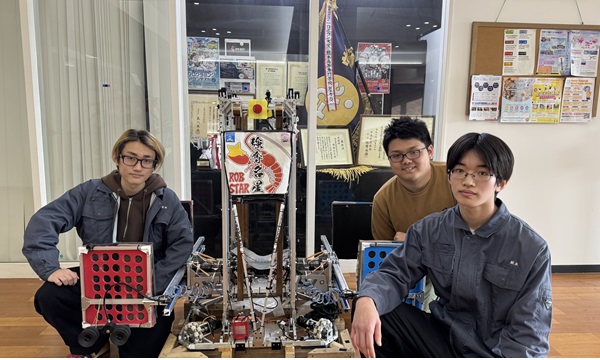 ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり