『アイデア対決・全国高等専門学校ロボットコンテスト』、通称・高専ロボコンは、毎年新たに設定される課題に沿って、およそ半年をかけて作り上げられたロボットが対戦する競技会だ。その出場ロボットを見てみると、金属のフレームが目立つ「機械っぽい」機体だけではなく、凝った装飾が施された「キャラクターっぽい」機体も多いことがわかる。
ルールで装飾が義務付けられていることに加え、大会での表彰には「デザイン賞」が設けられている。高専生たちは大会で得点を取るためのアイデアや技術はもちろん、魅力的な装飾にも知恵を絞っているのだ。どんな装飾をするかは自由なのだが、高専は高校や大学と比べて設置されている数が限られていることもあってか、モチーフとして地元の名所・名物や特産品、偉人などがチョイスされることは少なくない。
2023年大会テーマは『もぎもぎ!フルーツGOラウンド』。フィールド内で様々な高さに吊られたフルーツ(を模したアイテム)を収穫すれば得点。自らの陣地に持ち帰って収穫かごに入れると、さらに高得点が獲得できるというルールである。(詳細は
こちら)
今大会の中でひときわ印象的だったのが、獅子舞そのものにしか見えない頭を持ち、獅子舞らしい動きでフルーツをもぎ取っていた沖縄高専「獅子舞プロジェクト」だ。しかもお助けアイテムはくるくる回る小さな獅子舞。足元には地区大会では存在しなかった謎の鳥もいる。「2020年から続いたプロジェクトの総決算として作られた」というこのロボットと、それを作り上げたチームを知るために、取材に伺った。
 学校そのものが2004年開校で、国立高専の中では最も新しい。唯一「高専ロボコン」が始まってから開校した国立高専でもある。リゾートホテルと見間違いそうな外観。
学校そのものが2004年開校で、国立高専の中では最も新しい。唯一「高専ロボコン」が始まってから開校した国立高専でもある。リゾートホテルと見間違いそうな外観。
「沖縄をどんどん出していこう」でスタート
 宮里鷹翔さん(左)、中村英誠さん(右)
宮里鷹翔さん(左)、中村英誠さん(右)
まず最初に答えてくれたのは、“獅子舞”シリーズをスタートさせ、5年生の今日まで沖縄高専のロボコン部全体を引っ張ってくれたという中村英誠さんだ。
——“獅子舞”のシリーズは、どんなきっかけで始まったんですか?
中村英誠さん(以下、中村さん):ロボコンで上位を目指そうとしたときに「強さ」も重要なんですが、装飾や動きで「印象に残りやすいもの」も重要と考えたんです。沖縄には「シーサー」や「獅子舞」といった、カラフルで独特な印象に残るモチーフがあります。それなら「沖縄」をどんどん押し出していこう、ということで始めました。
そうして作り続けた“獅子舞”の集大成が、2023年に地区大会技術賞・全国大会アイデア賞を獲得した「獅子舞プロジェクト」だ。中村さんとともに初代からプロジェクトをけん引してきた宮里鷹翔さんも思い入れは負けていない。
宮里鷹翔さん(以下、鷹翔さん):「今年のお助けアイテムは「昇琉」の獅子舞ロボット、フルーツをくわえる獅子舞の頭は「ryuとtama」の頭がモデルですね。“沖縄高専”をイメージさせるモチーフをひとくくりにした機体です」
 他の部分は部品として利用されてしまい、頭だけになってしまった「ryuとtama」。頭の装飾はわずか2日で作ったという。
他の部分は部品として利用されてしまい、頭だけになってしまった「ryuとtama」。頭の装飾はわずか2日で作ったという。
 オーバーヘッドシュートを決める「昇琉」の獅子舞ロボット(左)。右のシーサーは自動でリフティングする。このコンビで2021年は全国大会に出場した。
オーバーヘッドシュートを決める「昇琉」の獅子舞ロボット(左)。右のシーサーは自動でリフティングする。このコンビで2021年は全国大会に出場した。
「うちなーちゃんぷるー」は厳密に言うとプロジェクト内のロボットではない、とも話してくれた。だから除外されているのかと思いきや、よくよく掘り下げると、操縦者の手首に着けられたミニ獅子舞の中身、コントローラー自体が、「うちなーちゃんぷるー」のコントローラーをほぼコピーしたものだという。しっかり血肉となって取り込まれているわけだ。そして、極めつきは足元にいる緑色の鳥。
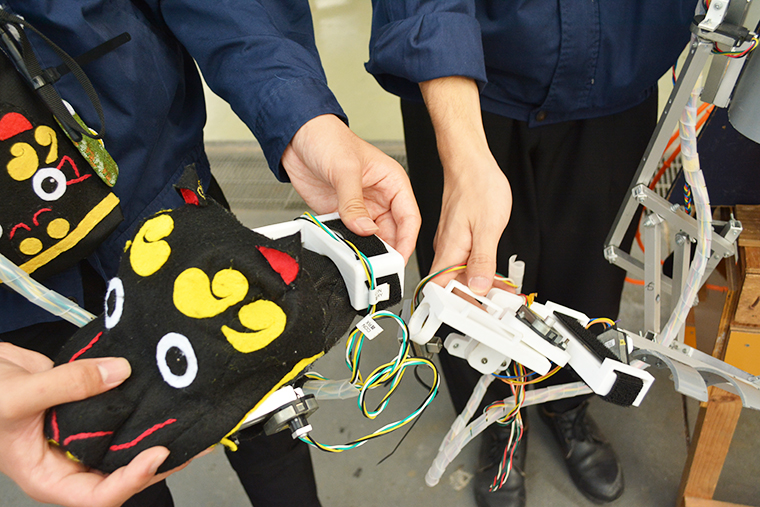 実は「うちなーちゃんぷるー」のコントローラー(右)がほとんどそのまま使われている、「獅子舞プロジェクト」のコントローラー(左)。
実は「うちなーちゃんぷるー」のコントローラー(右)がほとんどそのまま使われている、「獅子舞プロジェクト」のコントローラー(左)。
鷹翔さん:これは、都城高専さんが2023年大会で制作したロボット「ペケペケ!カカポ&コカポ」のカカポです。全国大会に行くことが決まったあと、落ちたフルーツの回収機構を新たに組み込もうとなった時に、同じような回収能力を持っていた都城さんリスペクトで盛り込みました。
宮崎県にある都城高専は同じ九州沖縄地区であり、限られた全国大会出場枠を争うライバルのはず。しかしミニロボコンなどで交流を深めていく中で、2022年に都城高専が全国大会に進出。その際、「一緒に全国大会へ!」との思いでシーサーのぬいぐるみをロボットに載せてくれたのだという。そして今年はその恩返しの気持ちも込めて「カカポ」が装飾として載せられたわけだ。
順番に伺っていくと、初代の獅子舞から都城高専とのエピソードまで、すべての伏線を回収した、まさに“総決算”の看板にふさわしいロボットである。それらを一つの形にまとめたアイデアと技術力にも脱帽するしかない。
“獅子舞らしさ”を最優先した設計
——よく「優勝を狙うロボット」と「大賞を狙うロボット」の違いが採り上げられますが、「獅子舞プロジェクト」はどちらだったのでしょう?
鷹翔さん:自分たちは完全に面白さで大賞を取りに行こうとしていましたね。獅子舞がキウイを食べる動きをいちばん魅力的にするようにこだわっていました。地区大会の後で首をひねる関節を1つ増やして、よりリアルに動くようにしたのもそのためです。
ルール発表前から「獅子舞にしたいな」と考えていたという鷹翔さん。今大会では上半身(獅子舞部分)の設計と装飾を担当した。ルールを一読してすぐ、「獅子舞で食べればいいじゃん」となり、頭を決めてからロボット全体を考えていったのだという。
宮里彰吾さん(以下、彰吾さん):ロボットの口の開け閉め、首の上げ下げ、首の横振りは、操縦者の手首から先、首のひねりは操縦者の肩の動きと連動しており、4つのロータリーエンコーダで読み取ることで行っています。首の伸び縮みは左手に持った別のコントローラーで行っています。
 手をどのくらいの角度にすれば、機体がどう動くかの感覚は体に染みつかせているという彰吾さん。視覚で細かい位置や姿勢を合わせながら、「ぱっくん」と収穫していたそう。
手をどのくらいの角度にすれば、機体がどう動くかの感覚は体に染みつかせているという彰吾さん。視覚で細かい位置や姿勢を合わせながら、「ぱっくん」と収穫していたそう。
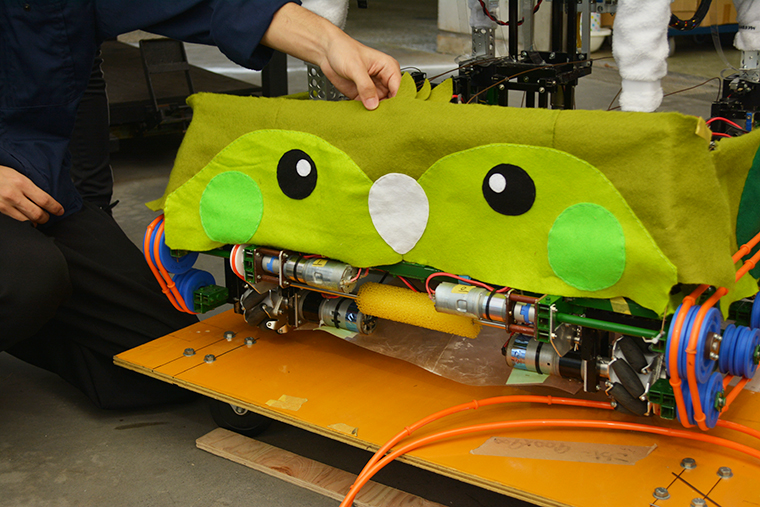
リーダー/フォロワーシステム(*1)で動く獅子舞の頭は、じつはキウイしか直接収穫できない。より高い場所にあるフルーツは、お助けアイテムを使って、下で待ち受ける獅子舞の口の中に落とす形である。ただ、獅子舞の頭の周囲はフレームやモーターなどがぎっしりで、使える場所や動力は限定的になる。そこで頭の後ろの狭いスペースに、差し込み口とモーター1つで駆動できる超シンプル機構を配置してみたところ、これが偶然にもしっかり機能したという。
*1:操縦者(リーダー)の動きをセンサで読み取り、そのまま対象(フォロワー)の動きとして反映させる仕組み。
お助けアイテムは角パイプを射し込み口に挿すだけで完結。ギヤもそのまま嵌めるだけ。「ロック機構も試作したんですけど、挿してみたら抜けなかったのでそのままです」(鷹翔さん)。
——しっぽがピョコピョコ動くのも可愛いですね。
彰吾さん:あ、じつはしっぽに右手のコントローラーについたエンコーダーの状態が表示されているんですよ。
説明はこうだ。操縦者の右手にはリーダー/フォロワーシステムのコントローラーが付けられているので、そのまま指や手を動かすと獅子舞の頭が動いてしまう。そのため、「頭は動かしたくないが右手を動かしたい時」にユニットのエンコーダーをロックして、右手の動きを拾わないようにするのだが、現在エンコーダーがロックされているかどうかを、しっぽの動きで確認できるのだという。
彰吾さん:しっぽのサーボは付くということだったので、「じゃあサーボ使うんだったら動きをインジケーターにしようかな」と考えて、何も言わずに実装しました(笑)。
 琉球獅子舞の特徴でもあるしっぽ。設計した鷹翔さんはインジケーター目的で付けたわけではなく、(しっぽが動いて)当たり前と思って付けただけだそうだ。
琉球獅子舞の特徴でもあるしっぽ。設計した鷹翔さんはインジケーター目的で付けたわけではなく、(しっぽが動いて)当たり前と思って付けただけだそうだ。
ロープ抜けでも琉球獅子舞へのリスペクト
今回のフィールドは、途中でロープをくぐり抜ける必要がある。「獅子舞プロジェクト」は、ロボットの真ん中をロープが通過するアイデアを採用した。しかし、鷹翔さんは設計しながら不安になったという。
鷹翔さん:ロボットの中にロープを通す構造にすると、「ロボットが分離している」と判断されるのではと心配だったんです(*2)。持ち上げるだけで外れたり、電源オフで外れてはダメなんじゃないと心配で。
*2:今大会は競技に参加できるロボットが1台と規定されている。
そこで鷹翔さんは、前脚と後脚を収める部品の前後をワイヤーで繋ぎ、脚が収まっているほうにロックがかかり、反対側がフリーになる機械的な仕組みを実装。前脚・後脚の一方しか外れず、上下のロボットは必ずどちらかで繋がっている構造とした。不測の事態が起きて4本全て外れた場合は、安全装置が働いてロボットの電源がオフになるという念の入れようだ。
ロープを通り抜けるだけであれば、分離と疑われかねない危険を冒して脚を上げ下げするよりも、ロープが抜ける最低限のすき間を通すほうが効率的にも思える。しかし、ここにも“獅子舞”へのリスペクトが組み込まれていた。ロープをまたぐとき、後ろ足だけで立ち上がる動きは、琉球獅子舞で後脚の人が前脚の人を持ち上げる特徴的な動きをイメージしている。だからこそ、大きく、しっかり上げたのだ。
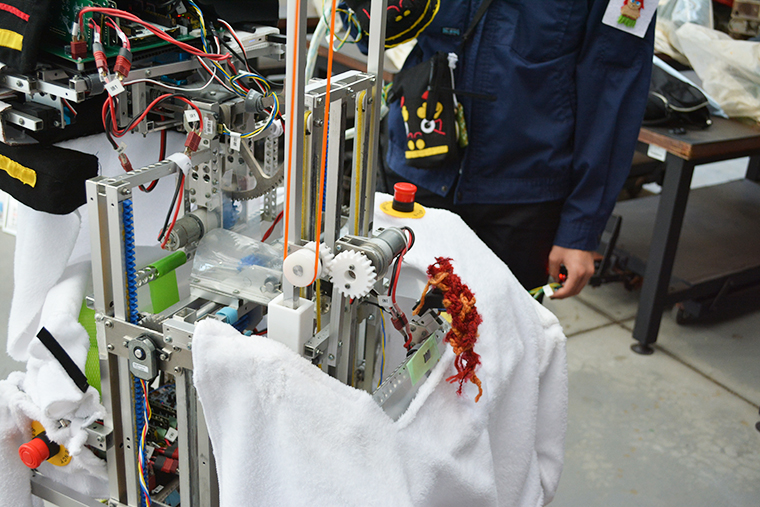
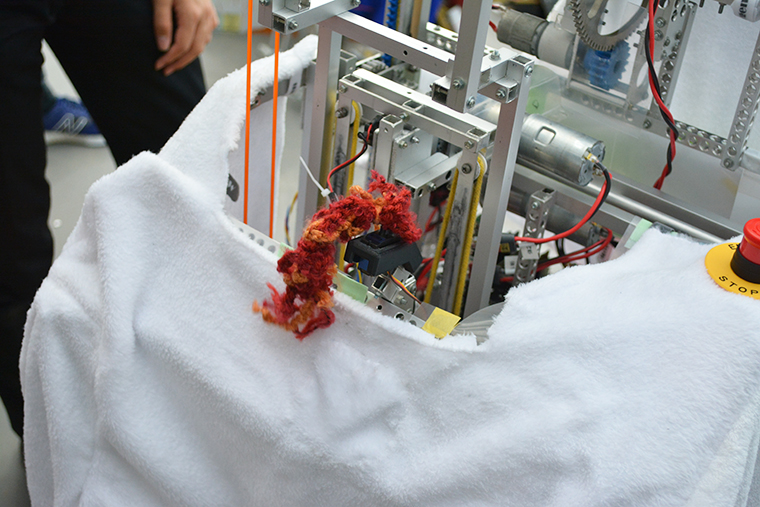
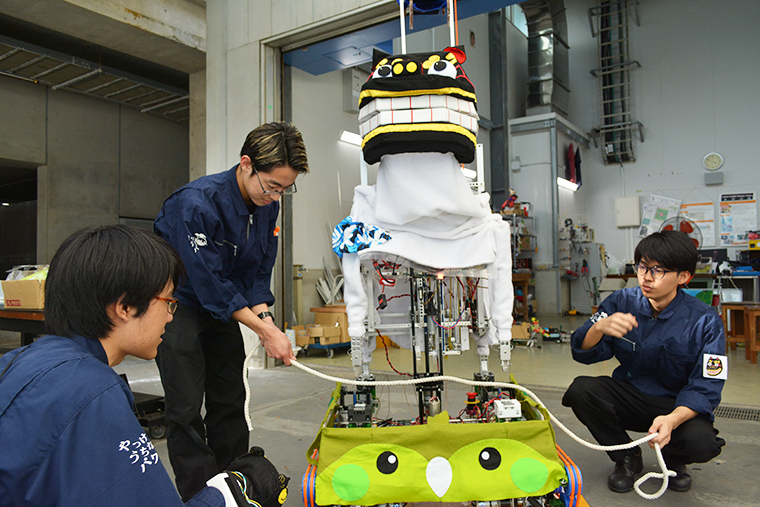 ロープの太さと比較すると、かなり大きく前脚が上がる。下半身の上面には針金が渡されていて、ロープはその上を滑って通ることになる。
ロープの太さと比較すると、かなり大きく前脚が上がる。下半身の上面には針金が渡されていて、ロープはその上を滑って通ることになる。
 白いボックス状の部品が前脚のロック機構。右手にある黒い後脚のロック機構にワイヤーが伸びている。ボックスの横にスイッチがあり、しっかり刺さっているかどうかも検知する。
白いボックス状の部品が前脚のロック機構。右手にある黒い後脚のロック機構にワイヤーが伸びている。ボックスの横にスイッチがあり、しっかり刺さっているかどうかも検知する。
——上下のロボットは電気的にも機械的にも別々なんですね。
鷹翔さん:ケーブルは全く繋がっていません。非常停止スイッチだけが無線で通信しています。どちらかを押せば上下両方が停まるように、という点は事務局から指摘されました。
彰吾さん:その連絡、じつはロボットを発送する1週間前くらいに来て(笑)。大きいリレーを動かせるような駆動力も電流源もないですし、試行錯誤しながら作りました。
鷹翔さん:正直「は? 今から?」という感じでした。スイッチもギリギリに付けて、発送1日前に確認してそのまま送り出して…動いてくれてよかったです。
素早く、確実に動く下半身は丁寧な仕事の結果
「カカポ」の外装を身にまとった下半身は、3年生の伊志嶺孝太さんが設計と操縦を担当した。全方向移動ができるメカナムホイールのほかに、自作のウレタンベルトによるクローラーが同居するハイブリッド構成が目を引く。
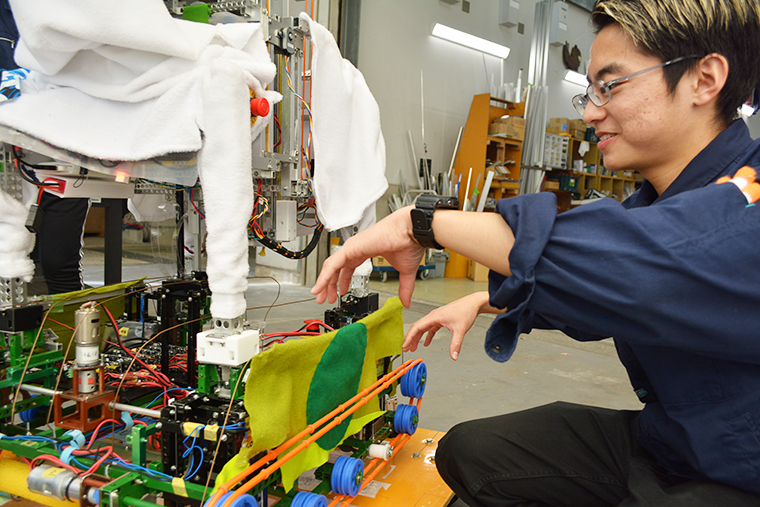 角材の越えかたを説明してくれる伊志嶺孝太さん。
角材の越えかたを説明してくれる伊志嶺孝太さん。
伊志嶺孝太さん(以下、伊志嶺さん):フィールドにある角材を越えるとき、メカナムだけでは浮いてしまったら全く進めなくなるので、ベルトとの二刀流で行きました。
鷹翔さん:通常はクローラーをちょっと浮かせたままで走っていたんですが、うまくいかないときにはメカナムの高さを変えられるようになっていました。これがかなり便利で、練習と会場で角材の質が違ってうまく越えられないなんてこともあったんですが、対応できるようになっていました。
——クローラーのベルトにリブがあるのも特徴的ですね。
伊志嶺さん:角材を乗り越えるために引っかかりが欲しかったんです。溶着のときにできるバリがちょうどいい具合でした。真っすぐ溶着されていることが重要なので、はんだごてにかぶせるアルミの角ブロックを作り、溶着面が垂直になるように工夫しています。
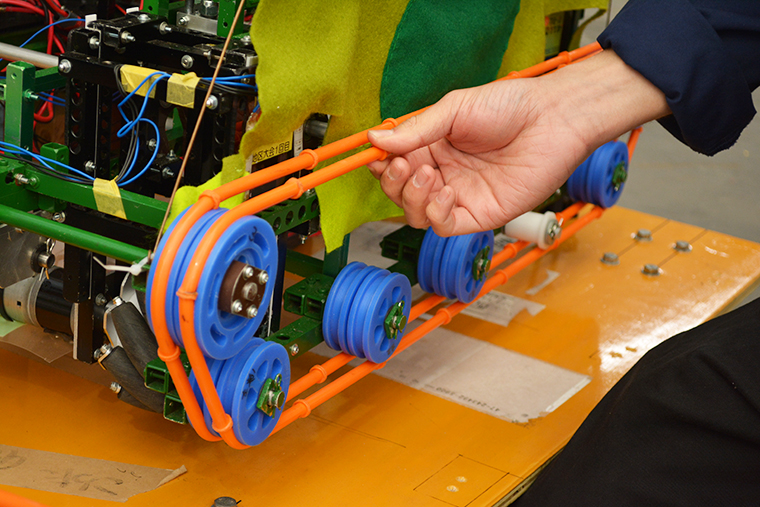 もともと1本のウレタンベルトを等間隔で切断し、再度溶着して繋げていったクローラー。
もともと1本のウレタンベルトを等間隔で切断し、再度溶着して繋げていったクローラー。
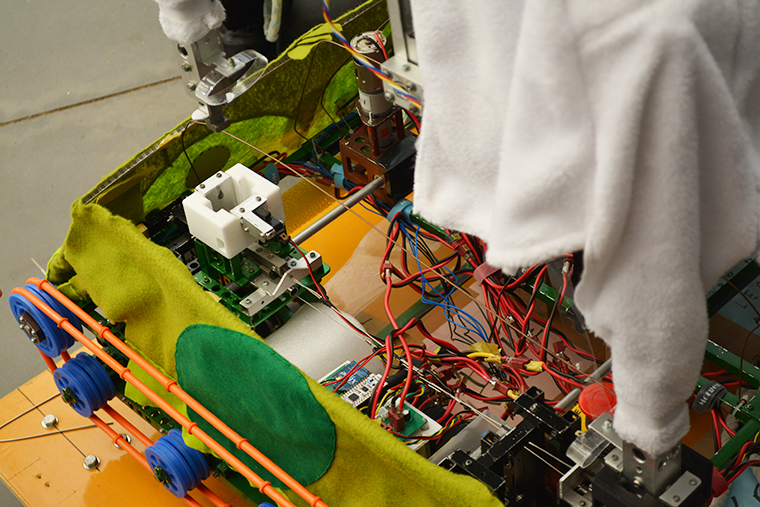
 “カカポ”をめくったところに組み込まれたフルーツの回収機構。他チームの機構はローラー自体がフルーツのサイズに合わせて動くように作られていたが、「獅子舞プロジェクト」はローラー側に潰れる素材を採用。元々付いている車高調整機能と組み合わせて、クローラーのモーターの力をそのまま使った。
“カカポ”をめくったところに組み込まれたフルーツの回収機構。他チームの機構はローラー自体がフルーツのサイズに合わせて動くように作られていたが、「獅子舞プロジェクト」はローラー側に潰れる素材を採用。元々付いている車高調整機能と組み合わせて、クローラーのモーターの力をそのまま使った。
——全体的にはイメージ通りに試合ができたんでしょうか?
鷹翔さん:もう少し先のセンターゾーンまで進みたかったなとは思っています。2回戦の小山高専さんは60点を確実に取るチームで、僕らも60点は取れるんですけど、70点獲るのが厳しかったんですね。1回戦で通信トラブルが起きていて、2回戦は通信を確認しつつで攻めた動きができなかったのが悔やまれます。
ネットの向こうも、会場も1つにした「うちなーちゃんぷるー」
 「うちなーちゃんぷるー」。片腕7つの可動軸で紙飛行機をつまんで飛ばす。着物は人間用の本物を縫い合わせた専用品。紙飛行機を載せるテーブルにも「みんさー織」の模様が。
「うちなーちゃんぷるー」。片腕7つの可動軸で紙飛行機をつまんで飛ばす。着物は人間用の本物を縫い合わせた専用品。紙飛行機を載せるテーブルにも「みんさー織」の模様が。
——リーダー/フォロワーシステムは「うちなーちゃんぷるー」が初挑戦だったんですか?
鷹翔さん:はい。コントローラーやセンサーの使い方は、この時に中村と、制御の同期メンバーが開発しました。朝も昼も来て、1日何時間やるんだって思うくらいやって、ある日突然「15個(センサーの値を)読めるようになったよ」と聞いたときは驚きました。
——ハードは中村さんですか?
鷹翔さん:機体もコントローラーも、両方中村が作りました。両腕で14、あとジャイロセンサーを使って前後進、傾きで旋回ができるので、センサーは全部で15個あります。関節も多いですが、本人は「そこ妥協できないでしょ」と。腕はほとんどサーボモーターですが、肘だけはスピードを出すためにモーターを使っていました。
——すごく複雑なシステムに挑戦したんですね。
鷹翔さん:自分たちは“面白いロボットが作りたい”がスタートで。紙飛行機投げるなら人型も面白そうだよね、と。ただ、いざルールが発表されて紙飛行機を作ったら、沖縄の湿気で次の日には重くなってすぐ落ちるんです。ならばもう完全に振り切っちゃおうと。中村も人型やリーダー/フォロワーシステムをやりたいと言っていたので、この方向で一致しました。
——会場ではみんながシーサーに成功してほしいという気持ちで一つになってましたよね。
鷹翔さん:国技館だけじゃなくて地区大会の会場も結構一つになってましたね。2022年は声出し応援禁止と言われていたんですが、それでも声が漏れ聞こえていましたから。
“空路必須”だからこその苦労と工夫
——そういえば、沖縄高専さんのロボットは船便で輸送されるんですか?
鷹翔さん:いえ、飛行機なんですよ。
今回の取材で一番驚いたのはこの話だ。高専ロボコンのロボットたちは、たとえ見た目が癒し系でも、中身は精密機械。離着陸の衝撃や揺れが激しい航空機輸送は本来避けたい手段のはずだ。立地からやむを得ないとはいえ、トラブルはないのだろうか。
——飛行機輸送のための対策はあるんですか?
鷹翔さん:2019年の地区大会に出場したとき、配線を付けたままで輸送したんですが、回路がダメになって接触不良が起こりました。なので、そのあとからは回路類を全部外して輸送しています。簡単に機構などを分解しつつ配線も全て外して、自分たちが手荷物で持ち込む形です。配線を全部外してつけるという練習も、発送の1か月前くらいから必ず行うようにしています。会場ではもう1回ロボットを組み立てるところからになりますね。
——早く会場入りできるわけでもないのに?
鷹翔さん:もちろん他校と同じです。地区も全国も、会場に入ったら組み上げて配線。全国大会の時には計量になかなか行けなくて、スタッフさんに急かされました。
——時間はどうしてもかかりますよね。
鷹翔さん:会場での組み立てを考えて、外しやすく組み立てやすい構造を意識しています。「獅子舞プロジェクト」は上下が外れたり、首も外しやすい設計にしていました。
彰吾さん:昨年まではモータードライバーと回路を直接配線で繋いでいましたが、今年からはマイコンと変圧基板、端子を備えたボードを制作して、分岐も含めてボード内に収めることで引き回す配線量をできるだけ少なくする工夫をしました。これで1時間くらい短縮できたと思います。
鷹翔さん:それでも組み立てだけで3時間くらいかかります。時間に追われながら組み立てて配線して、試走場に行って動かす部分をリストに従って1つ1つ確認して、それからやっとテストランになります。9時に入って14時くらいまでは組み立てなんですが、そこから17時くらいまでにテストランを終えないといけないんです。
大会前日のテストラン(本番のフィールドで練習できる機会)は、各チーム最大2回。1回目は優先権があり割り込めるものの、2回目は先着順のため、ほぼできないという。今大会でもテストランは1回。輸送のハンデは想像以上に大きいものだった。
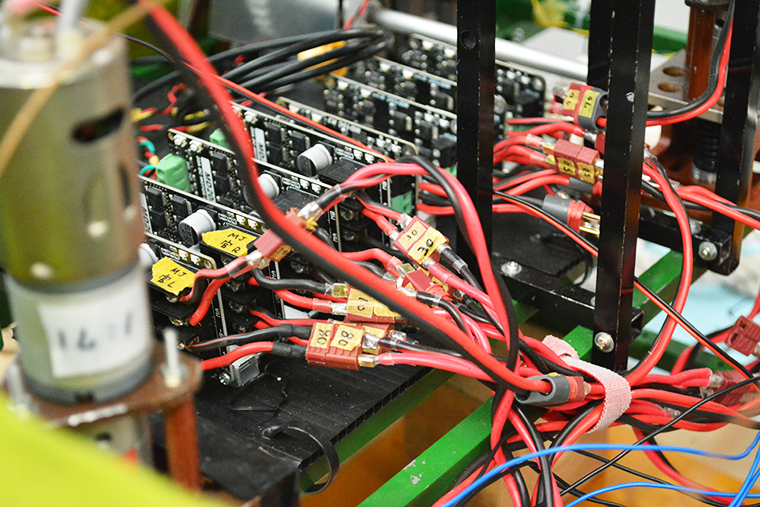 組み立てへの工夫は、配線のラベリングにも見えた。2桁の数字が書かれたコネクタは、10の位が系統を示し、1の位が何番目のコネクターかを示している。2021年に全国大会に出たときはナンバリングしておらず、非常に苦労した経験から導入されたそうだ。
組み立てへの工夫は、配線のラベリングにも見えた。2桁の数字が書かれたコネクタは、10の位が系統を示し、1の位が何番目のコネクターかを示している。2021年に全国大会に出たときはナンバリングしておらず、非常に苦労した経験から導入されたそうだ。
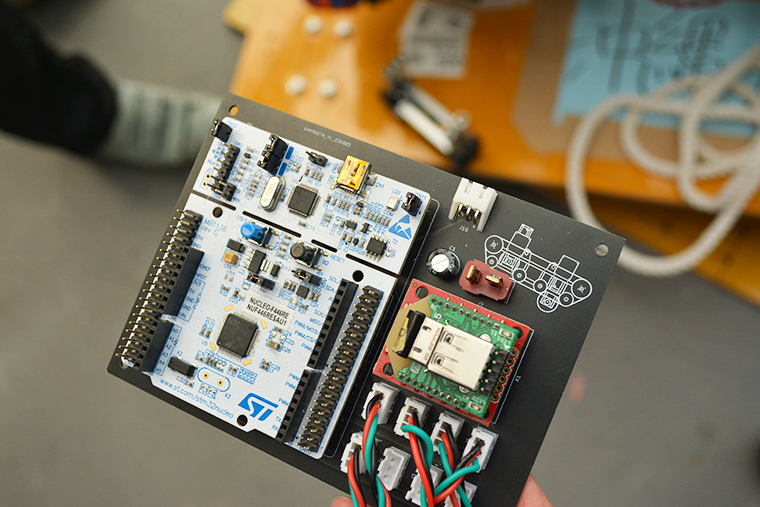 配線を減らす目的もあって様々な部分にオリジナルで立ち上げたボードが組み込まれている。足回り用のボードにはコネクタを乗り越えるクローラーが描かれている遊び心も。マイコンボードはSTの「STM32 F446RE Nucleo-64」という開発ボード。
配線を減らす目的もあって様々な部分にオリジナルで立ち上げたボードが組み込まれている。足回り用のボードにはコネクタを乗り越えるクローラーが描かれている遊び心も。マイコンボードはSTの「STM32 F446RE Nucleo-64」という開発ボード。
楽しんで作られた“やっかい”なロボット

歴代の“獅子舞”シリーズを取材しつつ感じたのは、中村さんを筆頭に現在の沖縄高専ロボコン部のメンバーが注入した「自分たちが作りたいものを楽しんで作る」という信念だ。ルールで規定される中にどうやって作りたいものを盛り込むのか。モチーフとして採用されている獅子舞やシーサーは確かに沖縄らしさだが、むしろその「楽しんで作る」精神に沖縄らしさを感じた。
チームユニフォームの袖には“やっけーうちなぁパワー”と掲げられている。「厄介な沖縄パワー」のような意味合いだとメンバーは自虐するように教えてくれた。しかし、沖縄高専の楽しんで作られたロボットたちは、見ているだけでこっちまで楽しくなってくる。むしろ“やっけー”なことに、いつの間にか沖縄高専のペースに巻き込まれて、こっちまで楽しくなってしまう、そんなパワーなのではないだろうか。
中村さんや鷹翔さんは「獅子舞やシーサーのイメージを残しすぎて、それがプレッシャーになってもいけない」と、ここで一区切りをつける考えだ。沖縄高専は学校創設から5年目の2008年に全国優勝して注目を集め、その後なかなか思うように結果が残せなかった時期がある。そんな経験も反映されているのだろうか。
しかし、“やっけーうちなぁパワー”を注ぎ込まれた後輩ならば心配ないのかもしれない。「かわいいキャラクターを活かすという路線は、そのまま続けていきたいなと思っています。それが獅子舞だったりシーサーだったり、他のものだったりするかもしれませんけど」「来年からは自分たちが考えた沖縄らしいロボット、皆が楽しめるロボットを作っていけたらなと思っています。プレッシャーはありますけど、自分たちが楽しむことを第一にやっていけたら」と、面持ちこそ緊張感は隠せないものの、「自分たちが作りたいものを」「楽しいものを」という芯の部分は受け継がれていた。
きっと来年以降も、沖縄高専ロボコン部が楽しんで作ったロボットが、海を渡って飛んでくる。どんな楽しいロボットがやってくるのか、今からこちらも楽しみだ。
 開校5年目で全国優勝した先輩の機体「Movement」。その後しばらくはプレッシャーが大きく、なかなか全国出場できなかったそうだ。
開校5年目で全国優勝した先輩の機体「Movement」。その後しばらくはプレッシャーが大きく、なかなか全国出場できなかったそうだ。
 全員違うヘルメットも、チームとしてのパフォーマンスのひとつ。動物だけではなく、琉球舞踊で使う花笠をモチーフにしたものも。
全員違うヘルメットも、チームとしてのパフォーマンスのひとつ。動物だけではなく、琉球舞踊で使う花笠をモチーフにしたものも。
ライター:梓みきお











 ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり